Bachelorarbeiten (abgeschlossen)
-
Absolute Positionierung ohne GNSS-Signale mittels LaserscanningIn dieser Bachelorarbeit wird eine Weiterentwicklung des in Schlichting und Feuerhake (2018) entwickelten Algorithmus zur absoluten Positionierung ohne GNSS-Signale mittels Laserscanning erarbeitet. Dabei wird während der Fahrt eine Sequenz von Scans aufgenommen, die anschließend mit einer vorher aufgenommenen Referenz verglichen wird. Durch das Suchen der besten Übereinstimmung zwischen Referenz und aufgenommener Sequenz wird die Position ermittelt. Nachdem im bisherigen Algorithmus die zu bestimmende Trajektorie zuvor auch exakt als Referenztrajektorie abgefahren sein musste, wurde in dieser Arbeit die Größe der Referenz dadurch reduziert, dass die Referenztrajektorie an den Kreuzungen aufgesplittet und neu zusammengesetzt wird, damit an Kreuzungen nicht alle Abbiegemöglichkeiten extra abgefahren werden müssen.Leitung: FeuerhakeTeam:Jahr: 2018
![]()
![]()
-
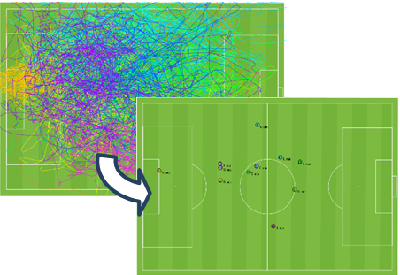
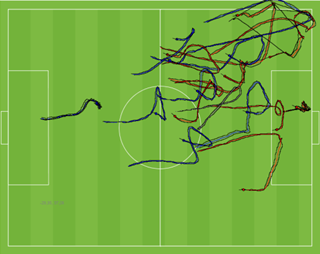
Wiedererkennen von Personen auf Basis ihrer BewegungstrajektorieHeutzutage werden in vielen Bereichen Bewegungsinformationen von Personen gesammelt und analysiert. Auch beim Fußball werden verteilte Kameras genutzt, um die Spieler auf dem Feld zu verfolgen. Diese dabei generierten Trajektorien können für verschiedene Analysen genutzt werden. Hierbei kann jedoch das Problem entstehen, dass Spieler nicht durchgehend verfolgt werden können. Sei es, dass sie zwischen den Sichtfeldern der Kameras wechseln oder dass sie gar in unterschiedlichen Spielen beobachtet werden.Leitung: FeuerhakeTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
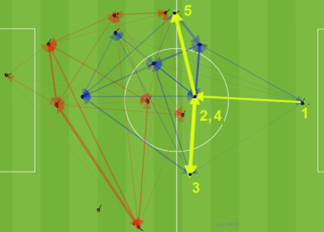
Erkennung von Bewegungsmustern in Trajektorien zur Auswahl mobiler DiensteSmartphones sind aus unserem Alltag kaum noch wegzudenken. Durch die Vielzahl der Anwendung wird der Nutzer jedoch vor das Problem gestellt, dass die gesuchte Anwendung schwer zu finden ist. Hier sollen mobile Dienste Abhilfe schaffen, indem sie basierend auf Kontextinformationen automatisch den richtigen Dienst für den Nutzer auswählen.Leitung: Feuerhake, GärtnerTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()






Masterarbeiten (abgeschlossen)
-
Occupancy-free Space Modeling and Navigation Path Planning in a 3D Voxel Grid Environment for Urban Digital Twin ApplicationsThe urban digital twin is an innovative concept within smart city technology, aiming to develop integrated and intelligent systems by harnessing diverse data from a multitude of sensors. Three-dimensional (3D) geodata plays a pivotal role in the representation and operation of urban digital twins. Tasks such as smart space management and navigation have become increasingly essential in urban digital twin applications, and they can be effectively facilitated using a foundation of 3D geospatial data. Therefore, this master thesis focuses on the modeling of unoccupied space and navigation path planning, employing a 3D voxel grid environment representation. The objective of the thesis is to develop a suitable approach for defining vacant space within urban area, which is utilized to enable collision-free 3D navigation. To achieve this, it is proposed to integrate the point cloud data of the Hannover urban area into a 3D voxel grid structure. In this context, grid cells containing point cloud data are treated as obstacles, while unoccupied cells are collectively constitute the occupancy-free space. The identified vacant space serve as a graph for implementing the shortest path algorithm. Ultimately, both the occupancy-free space and an illustrative route through it are visualized to demonstrate the approach viability.Leitung: Shkedova, FeuerhakeTeam:Jahr: 2023
-
Development of an approach for integrating various format data into a 3D voxel-based Urban Digital twinThe advancements in instruments and methodologies for collecting, transmitting, analyzing, and representing three-dimensional (3D) geodata over the past few decades have opened up extensive possibilities for various applications. 3D geoinformation plays a pivotal role in the operational frameworks of Smart City technology that can be represented within an Urban Digital Twin concept. This involves utilizing diverse data from numerous sensors and designing an adaptive digital model that learns from and evolves alongside the real city.Leitung: Shkedova, Feuerhake, SesterJahr: 2023
![]()
![]()
-
Exploring Herrenhausen GardensDevelopment of an Location Based Interactive Mobile Web Application for Enriching Visitors' Knowledge and ExperienceLeitung: Feuerhake, SesterJahr: 2023
![]()
![]()
-
Identifikation und Analyse von Bewegungsmustern in TrajektorienIn dieser Arbeit werden Bewegungsmuster in Trajektoriendatensätzen hinsichtlich der jeweiligen besuchten Orte einer Trajektorie identifiziert. Dazu werden den Aufenthaltspunkten weitere semantische Informationen abhängig von der Position, der Tageszeit und der Aufenthaltsdauer zugewiesen; die Zuweisung von semantischen Informationen hinsichtlich der Position erfolgt mit Hilfe von OpenStreetMap-Daten. Ein weiterer Schwerpunkt lag auf der Identifikation von zusammengehörigen Trajektorienteilstücken, da der gegebene Datensatz als Folge des Datenschutzes anonymisiert wurde; dazu wurde eine Koordinatenprädiktion für alle Trajektorien-Endpunkte durchgeführt, um mit Hilfe einer Umkreissuche und der zeitlichen Nähe einen geeigneten weiterführenden Anfangspunkt einer anderen Trajektorie zu identifizieren. Die auf Basis der Aufenthaltspunkte durchgeführte Erkennung von wiederkehrenden Bewegungsmustern erzeugt bei den verwendeten Datensätzen keine aussagekräftigen Muster, die im gesamten Datensatz in mehreren Trajektorien detektiert werden; allerdings werden für einzelne Trajektorien aussagekräftige, wiederkehrende Muster gefunden. Ein steigender Detailgrad bei der Zuweisung von Kategorien hinsichtlich des Aufenthaltsortes resultiert in weniger wiederkehrenden Mustern, die hingegen eine höhere Aussagekraft angesichts der Interpretation des Bewegungsverhaltens einer beobachteten Person zulassen.Leitung: Golze, Feuerhake, Wage, SesterTeam:Jahr: 2022
-
Entwicklung einer modularen Sensorplattform zur mobilen Erfassung von FahrzeugbegegnungenDas Fahrradfahren im gemeinsamen Verkehrsraum mit Kraftfahrzeugen bereitet vielen Radfahrer*innen Unbehagen. Das Meiden stark befahrener Straßen ist nur mit guter Ortskenntnis möglich, da zur Häufigkeit der Begegnungen mit Kraftfahrzeugen auf den meisten Straßen keine Daten vorliegen. Die Erfassung eines Datensatzes, der Smartphone-Sensordaten über Fahrzeugbegegnungen sammelt, könnte die Grundlage für einen Smartphone-basierten Fahrzeugdetektor bilden. Magnetometer- und Barometer-Messwerte werden als Indikatoren für vorbeifahrende Fahrzeuge verwendet. In dieser Arbeit wird zunächst eine Sensorplattform konstruiert, die zur Erhebung von Smartphone- und anderen Sensordaten im Fahrbetrieb dient. Das System ist so ausgelegt, dass es auch in Zukunft mit anderen Sensorkonfigurationen genutzt werden kann. Daraufhin wird eine Methodik vorgestellt, die auf Basis der Daten einer Kamera und eines Abstandssensors an der Sensorplattform einen Datensatz von Fahrzeugbegegnungen erzeugt. Dieser enthält zu den gefahrenen Trajektorien alle wichtigen Sensordaten eines handelsüblichen Smartphones inklusive der Zeitpunkte von Fahrzeugbegegnungen. Ab- schließend wird auf Basis des Datensatzes ein dreiklassiger Klassifikator trainiert und evaluiert. Dabei wird untersucht, welcher Ansatz einen generalisierbaren Klassifikator liefern kann. Für den Klassifikator werden mehrere auf dem Random Forest basierende Ansätze untersucht. Dabei werden Aufbau und Parameter einer Sliding-Window-Funktion zur Feature-Erzeugung angepasst.Leitung: Wage, Feuerhake, Golze, SesterTeam:Jahr: 2022
![]()
![]()
-
Nutzungsdatengetriebene Analyse des Potentials von MikromobilitätsdienstenDer geteilten Mobilität wird in der öffentlichen Debatte um die Verkehrswende häufig eine entscheidende Rolle zugeordnet. Darunter fallen auch die sogenannten Mikromobilitätsdienste. Das Ziel dieser Masterarbeit ist es, das Potential von Mikromobilitätsdiensten für die Verkehrswende im Hinblick auf die Intentionen der Nutzer, auf zeitliche Variationen, sowie auf Vorteile gegenüber anderen Transportmitteln datenbasiert zu bewerten. Dafür wird eine Fallstudie anhand von Mobilitätsdaten der Bikesharing-Fahrräder und Elektrotretroller zweier Anbieter in Hannover durchgeführt.Leitung: Wage, Feuerhake, GolzeTeam:Jahr: 2022
![]()
![]()
-
Visual communication of bicycle routes using cartographic symbolizationThe present work focuses on the visualization of specially selected features that occur on a bicycle route and that influence comfort while driving. Routes in an urban environment, which are represented by edges of a graph, are mainly used for visualization. These edges of a route are individually mapped with a visual variable each so that the underlying feature appears in a map display. The variants created in this way for one of five characteristics are tested in a user study for efficiency, effectiveness, attractiveness and suitability and compared with more information-rich visualizations. The result of the evaluation reveals that color representations as well as representations with symbols or signatures are perceived as the most ideal.Leitung: Golze, Wage, Fuest, Feuerhake, SesterTeam:Jahr: 2021
![]()
![]()
-
Entwicklung und Umsetzung einer webbasierten Visualisierung für 3D-PunktwolkenIn dieser Masterarbeit wird eine web-basierte Visualisierung für 3D-Punktwolken entwickelt. Die Lösung basiert auf Client-Server-Architektur und erweitert eine webbasierte 2D-Kartenvisualisierung des Instituts für Kartographie und Geoinformatik. Der Anwender kann durch eine Auswahl in einer Übersichtskarte den Einstiegspunkt in die 3D-Visualisierung wählen. Durch Komprimierungstechniken und durch das dynamische Nachladen samt entfernungsabhängiger Detailierungsgraden wird eine flüssige Navigation durch die komplette 3D-Punktwolke ermöglicht. Hierbei ist eine Steuerung per Tastatur und Maus möglich. Die client-seitige Umsetzung basiert auf WebGL, um im Browser um Ressourcen der Grafikkarte direkt zu nutzen können. Auf der Serverseite werden die Daten in einer datei-basierten Rasterstruktur vorgehalten.Leitung: FeuerhakeTeam:Jahr: 2021
![]()
![]()
-
Parking Pressure Identification using GIS ModellingSmart cities are a result of constant technological advancements that aim to improve the lives of its residents. One of the most significant features of smart cities is urban mobility. Urban traffic congestion is becoming increasingly common in major cities as the number of vehicles increases. Additionally, drivers all around the world struggle to find parking spaces in urban areas. Parking search traffic causes increased travel times and air pollution. So, it is essential to provide real time parking availability to the drivers to reduce the traffic congestion and protect from the increased emissions that affect the environment negatively. So that in this thesis we have used the Internet-of-Things (IoT) technologies and other spatial data which helps to build a model for the parking occupancy minutes prediction in the city of Berlin using Random Forest (RF) Regression machine learning algorithm. The RF Regression model achieved R2 value of 83 % which represents the accuracy of the model. Using the build model from the IoT sensors the parking pressure regions for the areas without sensor are predicted. By identifying the regions with high parking pressure, we can install the IoT sensors which will provide real time parking availability to the drivers through the mobile application.Leitung: Feuerhake, LeichterTeam:Jahr: 2021
![]()
![]()
-
Design, calibration and synchronization of a bicycle mapping platformIn this master thesis, we focused on the preparation of a low-budget mobile mapping system suitable for mounting on a bicycle. This topic formed since the mapping systems are mostly made from expensive sensors which makes it unaffordable for many applications. After having the hardware parts mounted on a model-designed platform we continue to make the system ready for data acquisition. Followed by multiple experiments to justify the system and its limitations. Later on, we did system calibration which in our case consists of camera calibration and extrinsic LIDAR-camera calibration, using this, we did a couple of outdoor data acquisitions and repetition of the system calibration. The results from the experiments are discussed afterwards from which we observed that the camera calibration parameters are oscillating significantly, besides, the transformation parameters estimated by the extrinsic calibration was not constant. These points brought us to the conclusion that the stability of the calibration parameters is needed to be studied in depth in order to find the accuracy of the system. Nevertheless, we managed to colourize the point cloud with the obtained calibration parameters and they were visually correct.Leitung: Feuerhake, BuschTeam:Jahr: 2021
![]()
![]()
-
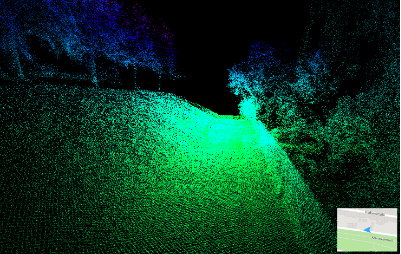
Kalibrierung von Crowd Sourced Messungen der Oberflächenrauigkeit mittels LiDAR DatenSmartphones als kompakte Multisensorplattformen ermöglichen es zum Beispiel beim Fahrradfahren die Oberflächenrauigkeit anhand von Positions- und Beschleunigungsmessungen zu erfassen und Aussagen über die Qualität des Untergrundes zu treffen. Die erfassten Beschleunigungen des am Fahrradlenkers befestigten Smartphones können allerdings ebenso durch den Luftdruck der Reifen, das Gewicht des Fahrers oder die gefahrene Geschwindigkeit beeinflusst werden, sodass sich die von verschiedenen Personen erfassten Daten nicht direkt miteinander vergleichen lassen. In der Arbeit wurde die Eignung von LiDAR Mobile Mapping Punktwolken als unabhängige Referenz für die Erfassung von Oberflächenrauigkeiten und die Modellierung möglicher Einflussgrößen untersucht. Grundlage der Untersuchung dieser Arbeit sind LiDAR Mobile Mapping Punktwolken eines Messgebietes im Georgengarten, für das zusätzlich Beschleunigungs- und GPS-Beobachtungen von 17 Testpersonen zur Verfügung gestellt wurden.Leitung: Feuerhake, Wage, BrennerTeam:Jahr: 2021
![]()
![]() © L. Peter
© L. Peter
-
Identification of Logistic Stopping Points in Big Vehicle Trajectory DataThe advance in positioning technologies has facilitated the generation of spatio-temporal data representing the mobility of different objects in geographical space, namely trajectories. Trajectory data mining, especially on trajectory datasets of immense volume, allows improving traffic problems by analyzing spatio-temporal events. Double (second-row) parking is an example of unusual stopping events, which are often caused by parcel delivery vehicles. One of the solutions for the elimination of second-row parking situations created by parcel providers and their additional consequences, such as potential traffic jams, is the provision of spatial parking spaces for parcel services, so-called logistic stopping points. The objective of this thesis is to suggest logistic stopping points for the Hannover region based on trajectory information generated by parcel delivery providers. The delivery trajectories have to be extracted from the provided big vehicle trajectory dataset. As the result, 4030 trajectories and 46, 589 stops are determined as delivery. Based on the obtained delivery stop information, 2018 logistic stopping points for parcel provider services are suggested for the Hannover region. Additionally, an algorithm for second-row parking situation detection is implemented. The algorithm is applied to the delivery stops that happened in the Linden-Nord district of Hannover. The analysis of the results of this work shows that 80% of the detected second-row parking situations could have been prevented by establishing the suggested logistic stopping points.Leitung: Sester, Feuerhake, Wage, KoetsierTeam:Jahr: 2021
![]()
![]() © M. Karakulina
© M. Karakulina
-
Identification of on-road and separate bicycle lanesCyclists are the most vulnerable participants in the road traffic in these days. Therefore, it is important to protect them, for example, by physically separated bicycle lanes. Continuous position tracking can yield a lot of data, which can help to understand how moving objects behave. This information could be used, e.g. in routing applications aiming to find a more secure route to the users destination. In this thesis the goal is to explore the idea of the identification of bicycle lane types of (OpenStreetMap) road segments using GPS trajectories of bicycles and motorized vehicles. This goal is archieved by applying clustering to the pool of trajectory data. Different distance measures are explored to distinguish between car and bicycle clusters. Three different bicycle lane types are identified within this thesis in the region of Hannover. Each of them can be classified with at least 70 percent accuracy. There are multiple reasons for inaccuracies like GPS positioning errors and the fact that not all cyclists drive on the respective bicycle lanes but on the car lanes.Leitung: Golze, Feuerhake, Prof. Rosenhahn, Prof. SesterTeam:Jahr: 2021
![]()
![]()
-
Classification of road roughness in mobile mapping dataDifferent road surface has different roughness, which is a very important feature for flood simulation, roads maintenance and driving safety assessment. This study aims to classify between different road types based on road roughness using mobile mapping data. The input data is LiDAR point cloud after ground removal. Road surfaces are defined as asphalt, cobblestone, grass area and road boundary four categories. The roughness descriptor is generated using multiple local geometric features and distance histogram. Random forest is used to train a classifier and weighted random forest is used to deal with the imbalanced data problem. To make the result smoother and more consistent, conditional random field is applied to process the predicted results. Finally, all tiles are merged and rasterized into 25cm grids to generate a road surface map. The result accuracy is 88.6% on training dataset and 84.7% on test dataset. The model results are validated on a large area where the overall accuracy is 82.9%.Leitung: Feng, FeuerhakeTeam:Jahr: 2020
![]()
![]()
-
Automatische Anreicherung von Routenbeschreibungen zur Ausbildung einer kognitiven KarteVon aktuellen Navigationssystemen genutzte Anweisungen beschränken sich üblicherweise auf Entfernungs- und Richtungsangaben (beispielsweise "Biegen Sie in 100 m links auf die Nienburger Straße ein"). Auf diese Weise erreicht der Nutzer zwar das Ziel, hat anschließend jedoch Schwierigkeiten sich eigenständig zu orientieren.Leitung: Sester, FeuerhakeTeam:Jahr: 2017Laufzeit: 2017
![]()
![]()
























Offene Bachelorarbeiten
-
Bestimmung von Mustern in FahrzeugtrajektorienDie Bewegungstrajektorien von Fahrzeugen erlauben Rückschlüsse auf raum-zeitliche Situationen. So können beispielsweise Haltepunkte detektiert werden oder auch Stausituationen, oder auch Anomalien wie temporär nicht zu befahrende Straßensegmente. In der Arbeit sollen in einem großen Trajektoriendatenbestand solche Muster automatisch erkannt werden. Der Datenbestand umfasst sehr viele Trajektorien. Bei Interesse kann ein Schwerpunkt auf die skalierbare Datenanalyse mittels Hadoop und Spark gelegt werden. Je nach Schwerpunkt ist die Arbeit sowohl als Bachelor- als auch als Masterarbeit bearbeitbar.Team:Jahr: 2020
![]()
![]()

Offene Masterarbeiten
-
Dynamic Urban Digital Twin Representation via Spatio-Temporal Voxel MeshingUrban digital twins are virtual models that integrate real-time data to simulate and analyze cities, providing valuable insights for urban planning, traffic management, environmental monitoring, and disaster response. A common approach for creating these 3D models is voxel-based representation, where urban environments are represented by small cubic units (voxels). While offering high resolution, updating such detailed models in real time can be computationally expensive, especially for large urban areas. In highly detailed voxel models, updating each individual voxel—such as in a 10 cm resolution grid—can become inefficient, especially when many areas of the city remain stable over time.Leitung: Shkedova, SesterJahr: 2024
![Dynamic Urban Digital Twin Representation via Spatio-Temporal Voxel Meshing]()
![Dynamic Urban Digital Twin Representation via Spatio-Temporal Voxel Meshing]()
-
Interactive Visualization of Parking Occupancy over Time in a 3D Urban Digital Twin Web ApplicationIntroduction In today's rapidly growing urban environments, efficient parking management has become a crucial challenge. As cities expand, the demand for parking spaces increases, making it essential to monitor parking occupancy in real-time or over time. Integrating this information into modern virtual 3D models of real-world cities (urban digital twins) provides an effective way to visualize parking space availability, helping reduce congestion and optimize urban mobility. However, the challenge lies in effectively visualizing parking occupancy within a 3D urban model. Unlike traditional 2D maps, 3D visualizations offer a more immersive and detailed perspective, but conveying time-dependent data—such as parking space availability at different times—within this context can be complex. Traditional 2D visualizations often use color codes or simple markers to represent occupancy status, but translating this into a 3D environment requires developing an intuitive system that allows users to interact with both the spatial and temporal dimensions of the data. The goal of this thesis is to design an interactive and user-friendly visualization approach that presents parking occupancy information in a way that allows users to explore both current occupancy states and historical data within a 3D urban digital twin.Leitung: Shkedova, SesterJahr: 2024
![Interactive Visualization of Parking Occupancy over Time in a 3D Urban Digital Twin Web Application]()
![Interactive Visualization of Parking Occupancy over Time in a 3D Urban Digital Twin Web Application]()
-
Development of a Mobile Web Application with Augmented and Mixed Reality FeaturesAugmented Reality (AR) and Mixed Reality (MR) are rapidly evolving technologies that provide new opportunities for the visualization and interaction with spatial data. Mobile devices, equipped with advanced sensors and cameras, make AR/MR accessible to a broad audience, enabling innovative applications in the geoinformatics domain. Despite recent advancements, challenges remain in determining the precise pose of the mobile device and accurately localizing virtual objects within the real-world environment. Addressing these challenges is critical for delivering effective AR/MR solutions. The goal of this thesis is to develop a mobile web application featuring AR/MR capabilities using HTML, JavaScript, and other relevant web technologies. The application should leverage device sensors to determine the current pose of the phone (position and orientation) and localize virtual objects in the physical world.Leitung: FeuerhakeJahr: 2024
![]()
![]()
-
Bestimmung von Mustern in FahrzeugtrajektorienDie Bewegungstrajektorien von Fahrzeugen erlauben Rückschlüsse auf raum-zeitliche Situationen. So können beispielsweise Haltepunkte detektiert werden oder auch Stausituationen, oder auch Anomalien wie temporär nicht zu befahrende Straßensegmente. In der Arbeit sollen in einem großen Trajektoriendatenbestand solche Muster automatisch erkannt werden. Der Datenbestand umfasst sehr viele Trajektorien. Bei Interesse kann ein Schwerpunkt auf die skalierbare Datenanalyse mittels Hadoop und Spark gelegt werden. Je nach Schwerpunkt ist die Arbeit sowohl als Bachelor- als auch als Masterarbeit bearbeitbar.Team:Jahr: 2020
![]()
![]()






Abschlussarbeit Fussball
-
Fußball-Analyse am Computer: Tracking von Objekten mit Hilfe unterschiedlicher nicht-statischer KameraperspektivenDie Grundlage für viele Analysen im Bereich der Fußballanalyse ist die Information über die Bewegungen der Spieler (und des Balls). Diese Bewegungen werden als Trajektorien, also einer zeitlichen Abfolge von Objektpositionen, modelliert. Die Erfassung der Trajektorien ist jedoch eine komplexe Problemstellung. Daher werden u.a. Tracking-Verfahren genutzt, die Spieler- und Ballpostionen in Bildern/Videos ermitteln. Viele Ansätze für das sogenannte Video-Tracking bedingen die Verwendung von statischen (fest installierten, nicht beweglichen) Kameras.Leitung: FeuerhakeJahr: 2017
![]()
![]()
-
Fußball-Analyse am Computer: Identifikation von Spielern anhand typischer BewegungenBei der Analyse von sich bewegenden Objekten spielt die Erkennung von typischen Bewegungen bzw. Bewegungsmustern eine wichtige Rolle. Dieses gilt auch bei der Analyse von Fußballspielen. Dort werden bspw. wiederkehrende, also typische, Bewegungen dazu genutzt, um Rückschlüsse auf die Taktik und auf die Eigenheiten der Spieler selbst ziehen zu können.Leitung: FeuerhakeJahr: 2017
![]()
![]()
-
Fußball-Analyse am Computer: FootballAnalysisVR – Nutzung eines Virtual Reality-Systems zur Analyse und Visualisierung von FußballspielenIn dieser Abschlussarbeit soll ein Virtual Reality-System (VR-App für Smartphone/PC) entwickelt werden, mit dem ein Anwender in Lage versetzt wird, das Spiel aus der Sicht eines beteiligten Spielers oder Schiedsrichters zu erleben.Leitung: FeuerhakeJahr: 2017
![]()
![]()
-
Fußball-Analyse am Computer: Ermittlung von Spielerrollen aus Basis ihrer BewegungstrajektorienFür viele weiterführende Analysen eines Fußballspiels (z.B. die Analyse des Verhaltens eines Teams in Offensiv- bzw. Defensivsituationen) ist nicht nur die Information über die jeweiligen Spieler (aktuelle Position, Geschwindigkeit, usw.) wichtig, sondern auch die Rollen, die die Spieler im Spiel bekleiden.Leitung: FeuerhakeJahr: 2017
![]()
![]()
-
Fußball-Analyse am Computer: Ermittlung der Ballposition auf Basis der SpielerbewegungenJe nach System ist es manchmal nicht möglich, Informationen über die Position des Balls zu erhalten. So kann ein Ball bspw. nur schwer mit einem GPS-Sensor ausgestattet werden, oder aber die genutzten Kameras sind auf Grund der Entfernung oder der Geschwindigkeit nicht in der Lage, den Ball zu detektieren. Ohne die aktuelle Ballposition sind viele aussagekräftige Analysen nicht durchführbar.Leitung: FeuerhakeJahr: 2017
![]()
![]()
-
Fußball-Analyse am Computer: Automatische Detektion von Offensivsituationen und deren MusterIn dieser Bachelor-/Masterarbeit sollen die Fragen geklärt werden, ob es typische Offensivstrategien gibt und wie sie automatisch erkannt und extrahiert werden können.Leitung: FeuerhakeJahr: 2017
![]()
![]()