Abgeschlossene Bachelorarbeiten
-
Evaluierung verschiedener Klassifikatoren zur Detektion von Objekten in PunktwolkenDiese Bachelorarbeit behandelt die Klassifikation von Objekten in Punktwolken. Die zu klassifizierenden Objekte sind Verkehrsteilnehmer in Form von LiDAR- (Light Detection and Ranging) Punktwolken und stammen aus dem waymo-Datensatz. Die Objekte sind hierbei bereits aus den Punktwolken segmentiert. Die hier vorkommenden Klassen sind Kraftfahrzeuge, Fußgänger, Verkehrsschilder und Fahrradfahrer, wobei die Anzahl der Fahrradfahrer weit unter der Anzahl der anderen Klassen liegt. Ein wesentlicher Aspekt in dieser Arbeit stellt das Implementieren von geeigneten Merkmalen dar, mithilfe derer die verschiedenen Objekte möglichst genau klassifiziert werden können. Die Klassifikation wird letztendlich mit insgesamt 49 Merkmalen durchgeführt. Verwendet werden die beiden überwachten Klassifikatoren Random Forest und Support Vector Machine. Es werden mit beiden Klassifikatoren jeweils ungewichtete und gewichtete Klassifikationen durchgeführt, wobei die gewichteten Klassifikationen erwartungsgemäß bessere Genauigkeiten erzielen. Die Gesamtgenauigkeit liegt bei der gewichteten Klassifikation bei Random Forest bei 97.83% und bei der Support Vector Machine bei 96.73%. Die Klassen ‘Kraftfahrzeuge’, ‘Fußgänger’ und ‘Verkehrsschilder’ werden bei beiden Klassifikatoren zu einem hohen Anteil korrekt klassifiziert. Oft werden Objekte fehlklassifiziert, welche in geringer Auflösung vorliegen oder von anderen Objekten verdeckt werden. Bei beiden Klassifikatoren gab es die prozentual häufigsten Fehlklassfikationen bei den Fahrradfahrern. Für höhere Klassifikationsgenauigkeiten bei dieser Klasse könnten ein ausgeglichener Datensatz verwendet werden. Außerdem könnte die Implementierung von Merkmalen, welche Fahrradfahrer besser charakterisieren, ebenfalls für höhere Genauigkeiten sorgen.Leitung: BuschTeam:Jahr: 2021
![]()
![]()
-
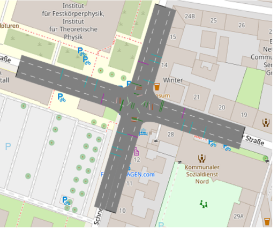
Evaluation der Lesbarkeit und der Nützlichkeit der Kartenschriften in topographischen KartenAmtliche topographische Karten enthalten viele verschiedene Kartenschriften, um z.B. Namen von Städten, Landschaften oder Gewässern zu vermitteln. In den jeweiligen Signaturenkatalogen ist festgelegt, welche Schriftarten, -farben und -größen in Abhängigkeit der Objektart und der Größe der Objekte verwendet werden. Ziel dieser Arbeit war es, einen Überblick über die verwendeten Schriftvariationen zu gewinnen und die Lesbarkeit und geordnete Wahrnehmbarkeit zu untersuchen. Zudem sollte untersucht werden, ob sich die Kartennutzer der Bedeutung der Schriftgrößen bewusst sind und diese auch tatsächlich nutzen. Der Fokus der Untersuchung lag dabei auf TK25, TK100 sowie dem WebAtlasDE. Es stellte sich heraus, dass bis zu neun Schriftgrößenstufen in den TKs verwendet werden. Die Größenunterschiede sind dabei inhomogen und teilweise sehr klein gewählt, sodass die geordnete Wahrnehmung in einigen Bereichen gestört ist. Es wurde daher ein Vorschlag für eine gleichmäßigere Einteilung mit weniger Klassen unterbreitet. Dabei wurde auch die minimale Schriftgröße etwas erhöht. Die durchgeführte Umfrage ergab auch, dass die Länge der dargestellten Namen keinen deutlich störenden Einfluss auf die Größenwahrnehmung hat. Bei grünen Kartenschriften gaben die Probanden teilweise an, dass der geringe Kontrast zum meist ebenfalls grünen Hintergrund Probleme bereitet. Die Abbildung zeigt eine Beispiel-Karte aus der Umfrage: Die hier zu vergleichenden grünen Schriften wurden auf einem realen Kartengrund präsentiert. In weiteren Arbeiten könnte untersucht werden, ob der Vorschlag für eine geringere Anzahl verschiedener Schriftgrößen eine tatsächliche Verbesserung der Lesbarkeit bringt und ob bei einer Beschränkung auf drei Schriftfarben die eindeutige Zuordnung der Schriften zu den Objektarten weiterhin möglich ist.Leitung: ThiemannTeam:Jahr: 2021
![]()
![]()
-
Anpassung von Gebäudegrundrissen aus Lidardaten an ALK-DatenIn der ALK sind Gebäude über ihre Grundrisse dargestellt. In luftgestützten Laserdaten bilden sich Gebäude als 3D-Formen ab. Aufgrund unterschiedlicher Erfassungsvorschriften und Aktualitätsstände kann es zu Verschiebungen zwischen diesen Datenbeständen kommen. Ziel der Arbeit ist es, diese Verschiebungen zu bestimmen und automatisch zu korrigieren.Leitung: Politz, SesterJahr: 2020
![]()
![]()
-
Erzeugen von Routen unter Berücksichtigung der SonneneinstrahlungWie bereits seit 200 Jahren bekannt ist, leiden Bewohner der nördlichen Breiten überdurchschnittlich häufig unter einem Vitamin D Mangel. Um diesem entgegenzuwirken sollte sich der Mensch dem richtigen Maß an Sonnenstrahlung aussetzen. Für Stadtbewohner ist dieses Ziel während der Arbeitswoche jedoch schwer zu erreichen, da die meiste Zeit des Tages in geschlossenen Räumen verbracht wird. Gelöst werden soll dieses Problem durch ein Routing, welches Fußwege hinsichtlich der Sonneneinstrahlung optimiert. Wichtigste Faktoren sind neben der draußen verbrachten Zeit und der Fläche der von der Sonne bestrahlten Haut die Verschattung durch Gebäude und Vegetation sowie die Orientierung zur Sonne.Leitung: Monika Sester, Oskar WageTeam:Jahr: 2020
![]()
![]()
-
Klassifikation von Mobile Mapping LiDAR PunktwolkenIn vielen Anwendungsgebieten der Geodäsie, beispielsweise dem des autonomen Fahrens, gewinnt die automatische Erkennung von Objekten in (urbanen) Regionen an Relevanz. Eingesetzt werden dafür verschiedene Aufnahmesysteme, dessen Daten in Echtzeit analysiert werden müssen. Besonders gut geeignet sind dafür Light Detection and Ranging (LiDAR) Punktwolken. In dieser Arbeit wird die Klassifikation von LiDAR Punktwolken verschiedener Methoden analysiert und bewertet. Als Datengrundlage dienten Scanstreifen aus einer Messkampagne des Instituts für Kartographie und Geoinformatik der Leibniz Universität Hannover. Mit Hilfe der Klassifikatoren Random Forests und Support Vector Machines konnten die einzelnen LiDAR Punkte 16 verschiedenen Klassen zugeordnet werden.Leitung: Brenner, SchachtschneiderTeam:Jahr: 2020
![]()
![]()
-
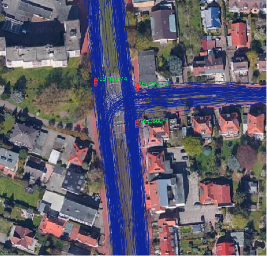
Absolute Positionierung ohne GNSS-Signale mittels LaserscanningIn dieser Bachelorarbeit wird eine Weiterentwicklung des in Schlichting und Feuerhake (2018) entwickelten Algorithmus zur absoluten Positionierung ohne GNSS-Signale mittels Laserscanning erarbeitet. Dabei wird während der Fahrt eine Sequenz von Scans aufgenommen, die anschließend mit einer vorher aufgenommenen Referenz verglichen wird. Durch das Suchen der besten Übereinstimmung zwischen Referenz und aufgenommener Sequenz wird die Position ermittelt. Nachdem im bisherigen Algorithmus die zu bestimmende Trajektorie zuvor auch exakt als Referenztrajektorie abgefahren sein musste, wurde in dieser Arbeit die Größe der Referenz dadurch reduziert, dass die Referenztrajektorie an den Kreuzungen aufgesplittet und neu zusammengesetzt wird, damit an Kreuzungen nicht alle Abbiegemöglichkeiten extra abgefahren werden müssen.Leitung: FeuerhakeTeam:Jahr: 2018
![]()
![]()
-
Simulation von GPS-Trajektorien als Trainingsdaten für das maschinelle Lernen von WegeachsenIn dieser Arbeit wird ein Algorithmus zur Simulation von realitätsnahen GPS-Trajektorien, als Trainingsdaten für ein Convolutional Neural Network, für den Bewegungsmodus Kraftfahrzeug präsentiert. Dazu wird das Straßennetz aus OpenStreetMap für ein Auswahlgebiet zu einem routingfähigen Graphen aufbereitet. Den verschiedenen Straßentypen werden charakteristische Straßenbreiten und Fahrstreifenanzahlen zugewiesen, aufgrund dessen Hilfsgeometrien für Fahrspuren generiert werden.Leitung: Frank Thiemann, Prof. SesterTeam:Jahr: 2018
![]()
![]()
-
Modellierung von TrajektorienDank globaler Navigationssatellitensysteme und deren kostenlosen Positionierungsdiensten, sowie kleinen, preiswerten GNSS-Empfängern, die heutzutage in den meisten Smartphones eingebaut sind, ist es so einfach wie nie zuvor, überall und jederzeit Bewegungen zu erfassen und aufzuzeichnen. Die dadurch entstehenden Datenmengen können schnell sehr groß werden. Dadurch werden diese Datensätze unpraktisch, wenn es um die Speicherung und Auswertung geht. Um dieses Problem zu beheben sind Verfahren notwendig, die die Daten reduzieren, dabei aber deren Informationsgehalt möglichst erhalten.Leitung: Colin FischerTeam:Jahr: 2016Laufzeit: 2016
![]()
![]()
-
Bewertung potentieller Ride-Sharing Treffpunkte anhand von Kartendaten am Beispiel BraunschweigWährend der Wunsch nach individueller Mobilität ständig weiter wächst und die Verkehrsbelastung insbesondere in urbanen Räumen dementsprechend steigt, bleiben dennoch viele Sitzplatzkapazitäten in privaten Fahrzeugen ungenutzt. Mitfahrgemeinschaften (engl. Ride-Sharing) können dieses Problem zumindest verbessern, indem die Auslastung von privaten Fahrten erhöht wird.Leitung: CzioskaTeam:Jahr: 2016Laufzeit: 2016
![]()
![]()
-
Ein optimales Maß für die Geländeundulation in NaturräumenIn Deutschland treten viele verschiedene Geländeformen auf. Aus diesem Grund ist das Land in verschiedene Naturräume aufgeteilt. Ziel der Arbeit war es, diese Regionen Deutschlands hinsichtlich ihrer Geländeeigenschaften zu untersuchen. Hierfür wurden die Parameter zur Ermittlung der Geländeundulation untersucht. Weiterhin wurden auch die mittlere Kurvigkeit sowie die Neigung der Straßen als Kriterium zur Beschreibung der Topographie verwendet.Leitung: Thiemann, SchlichtingTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Wiedererkennen von Personen auf Basis ihrer BewegungstrajektorieHeutzutage werden in vielen Bereichen Bewegungsinformationen von Personen gesammelt und analysiert. Auch beim Fußball werden verteilte Kameras genutzt, um die Spieler auf dem Feld zu verfolgen. Diese dabei generierten Trajektorien können für verschiedene Analysen genutzt werden. Hierbei kann jedoch das Problem entstehen, dass Spieler nicht durchgehend verfolgt werden können. Sei es, dass sie zwischen den Sichtfeldern der Kameras wechseln oder dass sie gar in unterschiedlichen Spielen beobachtet werden.Leitung: FeuerhakeTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Automatische Platzierung von Böschungsschraffen für archäologische PläneFür die Darstellung von Wällen und Gräben in archäologischen Plänen werden Schraffen verwendet. Anders als bei neuzeitlichen künstlichen Böschungen sind die historischen Böschungen durch Einwirkung der Erosion sehr unregelmäßig geformt. Standardalgorithmen scheitern aus diesem Grund bei der automatischen Anordnung der Schraffen.Leitung: ThiemannTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Identifikation von Parkstreifen in topographischen DatenIn der heutigen Zeit verbringt ein Großteil der Autofahrer zu viel Zeit damit, einen geeigneten Parkplatz zu suchen. Dies führt nicht nur zu gestressten Autofahrern sondern auch zu einem unnötigen CO2-Ausstoß. Zur Beseitigung dieses Parkplatzsuchverkehrs können dynamische Karten erstellt werden, die zum Beispiel auf dem Smartphone als App die freien Parkplätze in der näheren Umgebung anzeigen. Dafür muss die Lage der Parkplätze bekannt sein, jedoch wird diese bei amtlichen Vermessungen nicht explizit aufgenommen. In topographischen Liniendaten sind die Begrenzungen der Parkstreifen dennoch sichtbar.Leitung: Bock, CzioskaTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Verfahren zur halbautomatischen Konsistenzprüfung der tatsächlichen Nutzung in ALKIS und ATKISDie Landnutzungsdaten in den beiden amtlichen Informationssystemen ALKIS und ATKIS weisen oft Inkonsistenzen auf, unter anderem aufgrund von unterschiedlicher Erfassung und Fortführung, sowie einem unterschiedlichen Maßstab. Auch besitzen beide Systeme einen unterschiedlichen Objektarten- und Signaturenkatalog, wodurch eine direkte Zuordnung der tatsächlichen Nutzung aus beiden Systemen nicht immer ohne weiteres möglich ist.Team:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Entwurf von Design-Studien zur PunktwolkenvisualisierungHeutzutage lassen sich Geodaten in Form von Punktwolken in einem sehr schnellem Tempo erzeugen. Mit Hilfe von verschiedenen Laserscanningverfahren wie dem terrestrischem, luftgestütztem oder mobilem Laserscanning entstehen massive Datenmengen mit Millionen von Punktkoordinaten.Leitung: EggertTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Erkennung von Bewegungsmustern in Trajektorien zur Auswahl mobiler DiensteSmartphones sind aus unserem Alltag kaum noch wegzudenken. Durch die Vielzahl der Anwendung wird der Nutzer jedoch vor das Problem gestellt, dass die gesuchte Anwendung schwer zu finden ist. Hier sollen mobile Dienste Abhilfe schaffen, indem sie basierend auf Kontextinformationen automatisch den richtigen Dienst für den Nutzer auswählen.Leitung: Feuerhake, GärtnerTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Maschinelles Lernen von Generalisierungsregeln für LandnutzungsdatenLandnutzungsdaten werden in verschiedenen Systemen sowie Maßstäben bereitgestellt. Dazu zählen z.B. das Automatisierte Liegenschaftskataster-Informationssystem (ALKIS), das Amtliche Topographisch-Kartographische Informationssystem (ATKIS) sowie CORINE Land Cover (CLC). Mittels Generalisierung aus den jeweils höheraufgelösten Daten lassen sich die Systeme effizient fortführen. Die Systeme nutzen jeweils unterschiedliche Klassen und Aggregationen, wodurch geometrische und semantische Differenzen resultieren. Daher ist eine direkte Zuordnung einzelner Klassen nicht immer möglich.Leitung: ThiemannTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Untersuchungen zur Parallelisierung der Generalisierung großer Gebäude-DatenbeständeHeutzutage stehen Geodaten in solchen Mengen zur Verfügung, dass eine Verarbeitung mit den herkömmlich zur Verfügung stehenden Rechenressourcen kaum mehr möglich ist. Dies betrifft neben der benötigten Rechenzeit vor allem den verfügbaren Arbeitsspeicher. Auch wenn die Leistung der Hardware weiterhin steigt, wächst der Umfang der zu verarbeitenden Daten in noch größerem Maße. Eine Verarbeitung großer Datenbestände kann daher nicht mehr am Stück erfolgen, eine Aufteilung der Daten ist erforderlich.Leitung: ThiemannTeam:Jahr: 2013Laufzeit: 2013
![]()
![]()
-
Entwurf und Implementierung eines Geographiespiels für mobile EndgeräteDas Ziel dieser Arbeit war es, eine an das Spiel ”Deutschland: Finden Sie Minden?” (Kosmos Verlag) angelehnte Android-Implementierung aus frei verfügbaren Internetquellen zu entwickeln.Leitung: Schlichting, Eggert, Dahinden, WehrmarkerTeam:Jahr: 2013Laufzeit: 2013
![]()
![]()
-
Internationale Namen für die freie Seekarte OpenSeaMapOpenSeaMap ist ein Open-Source-Projekt zur Erstellung einer freien Seekarte. Es wurde im Jahr 2009 aufgrund eines hohen Bedarfs an frei zugänglichen Karten für die Seefahrt entwickelt. Zweck dieser freien Karte ist es für den Nutzer nautische und touristische Informationen zur Verfügung zu stellen, in ansprechender Weise zu visualisieren und diesen Datenbestand durch die Mitarbeit der Nutzer zu erweitern. Die Daten der OpenSeaMap sind unter einer offenen Lizenz frei verfügbar und können von jedem Nutzer damit beliebig genutzt und verändert werden.Leitung: WerderTeam:Jahr: 2012Laufzeit: 2012
![]()
![]()
-
Extraktion und Visualisierung ortsbezogener Informationen mit Tag-CloudsMobile Geräte wie Smartphones, Mobiltelefone, Netbooks und Tablets sind in unserer Zeit unerlässlich. Egal ob man sich zu einem Treffen verabreden, die neuesten Informationen erfahren oder sich einfach nur unterwegs beschäftigen will. Durch das mobile Internet wird dieser Aufschwung noch verstärkt, da man jederzeit verfügbar sein kann. Jedes dieser mobilen Geräte kann mehrere Sensoren (GPS-, Gyroskop-, Kompass-, Beschleunigungs- oder Lichtsensor) haben und jedes mobile Geräte benötigt ein Betriebssystem. Für viele dieser Betriebssysteme können Anwendungen (sogenannte Apps) geschrieben werden, die dann auf dem Handy laufen. Viele Informationen sind im Internet vorhanden.Leitung: EggertTeam:Jahr: 2011Laufzeit: 2011
![]()
![]()
-
Routenanweisung für Sehgeschädigte auf Basis von Openstreetmap-DatenIn der freien Weltkarte Openstreetmap werden neben allgemeinen Informationen wie Straßenverlauf auch Daten erfasst, die speziell für die Navigation für Sehgeschädigte benutzt werden können. So wird etwa das Vorhandensein von sehbehindertengerechten Ampeln erfasst. Um solche Daten für die Navigation nutzen zu können, braucht es allerdings eine speziell angepasste Hard- und Software.Leitung: DahindenTeam:Jahr: 2010Laufzeit: 2010
-
Thematische Karten auf Basis von WikipediaDie Online-Enzyklopädie Wikipedia beinhaltet eine Vielzahl von Daten. Für eine automatische Auswertung sind vor allem die Informationsboxen von Bedeutung, da diese Daten in strukturierter Form enthalten. Um die Daten zu verwenden, muss man allerdings nicht direkt auf die Wikipedia zurückgreifen, da in einem Projekt namens Vorlagenauswertung diese Informationsboxen ausgewertet und zusammen mit dem Titel des jeweiligen Artikels in einer Datenbank abgelegt werden.Leitung: DahindenTeam:Jahr: 2010Laufzeit: 2010
-
Analyse und Entwicklung von mathematischen Beschreibungsregeln für die Formerkennung von topographischen ObjektenDie Anzahl der verfügbaren Geodaten nimmt stetig zu. Dies ist auf zwei Trends zurückzuführen. Erstens sind einmal erfasste Daten nicht mehr an eine Anwendung gebunden, sondern werden oft interdisziplinär wiederverwendet. Zweitens werden umfangreiche Datensätze durch Laien erfasst, so z. B. im OpenStreetMap-Projekt (OSM). Die Daten des 2004 gegründeten Projekts sind unter einer offenen Lizenz frei verfügbar und können damit in eigenen Projekten verwendet werden.Leitung: Werder, KielerTeam:Jahr: 2010Laufzeit: 2010
![]()
![]()
-
Routenauswahlkriterien von FußgängernNavigation ist schon seit der Antike ein wichtiges Thema, dem sich jeher Wissenschaftler und Techniker widmen. In der Vergangenheit verstanden nur wenige Menschen die Arbeit eines Navigators. Heute im einundzwanzigsten Jahrhundert kann dagegen nahezu jeder Mensch die bekannten Navigationssysteme für Fahrzeuge bedienen. Durch die wachsende Präsenz von mobilen Kleincomputern wie den PDAs und GPS fähigen Mobiltelefonen, wird dem Wunsch der Nutzern entsprochen, auch für Fußgänger ein zuverlässiges Navigationsgerätgerät zu entwickeln.Leitung: PaelkeTeam:Jahr: 2009Laufzeit: 2009
![]()
![]()
-
Entwicklung einer Benutzeroberfläche zur manuellen Fassadenmodellierung mittels GrammatikenHeutzutage werden in der Geoinformatik und vielen anderen Disziplinen, wie beispielsweise der Architektur oder Stadtplanung, reichhaltige geometrische und semantische Informationen von Gebäuden benötigt. Mit diesen Informationen können 3D-Stadtmodelle erstellt werden, die in vielen Bereichen von Nutzen sind. Unter anderem wird die Navigation in der heutigen Gesellschaft zunehmend wichtiger. Bekannte Produkte wie Google Earth oder Microsoft Virtual Earth sind nur einige Beispiele, die demonstrieren, welch wichtige Stellung alle Arten von Geodaten heute einnehmen.Leitung: RipperdaTeam:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
Entwicklung von Gütekriterien für die Gebäudegeneralisierung und deren Anwendung in einem OptimierungsansatzDie Generalisierung befasst sich im Allgemeinen mit der Gewinnung von weniger detaillierten und höher abstrahierten Daten aus einem gegebenen räumlichen Datensatz. Oft kommen dabei Optimierungsverfahren zum Einsatz. Diese Bachelorarbeit baut auf einem Optimierungsansatz für die Gebäudevereinfachung auf, der am ikg entwickelt wurde.Leitung: HaunertTeam:Jahr: 2008Laufzeit: 2008
-
Echtzeit TemperaturkarteWeltweit gibt es verschiedene Organisationen und Firmen, die Temperaturen an bestimmten Orten messen und als Webdienst zur Verfügung stellen. Die Daten werden in unterschiedlichen Zeitintervallen erfasst und die Kosten und Nutzungsrechte variieren erheblich. Sieben Webdienste wurden bezüglich Aktualität, Datenhaltung, grafischer Aufbereitung, Kosten und Verwendungsrechte verglichen.Team:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
Untersuchung der Messgenauigkeit von Sportuhren mit Geschwindigkeits- und EntfernungsfunktionHeutzutage spielen Sportuhren zur Trainingssteuerung und -Dokumentation eine immer größer werdende Rolle. Während im Radsport seit Jahren Fahrradcomputer zum Einsatz kommen, steigt das Interesse an Entfernungs-, Geschwindigkeits- und Höhenmessungen in anderen Disziplinen stetig an. Gerade bei Sportarten wie Laufen oder Skifahren sind Planungs- und Analysemöglichkeiten gefragt.Leitung: ThiemannTeam:Jahr: 2007Laufzeit: 2007
-
3D-Visualisierung von Routen und LandmarkenNavigationssysteme erfuhren in den letzten Jahren eine völlig neue Bedeutung, besonders in der Nutzung für die Navigation von Kraftfahrzeugen haben sie sich mittlerweile in der Gesellschaft etabliert. Auch Systeme zur Fußgängernavigation beispielsweise mittels PDA werden immer beliebter.Leitung: EliasTeam:Jahr: 2007Laufzeit: 2007
![]()
![]()
-
Visualisierung von Routen und LandmarkenDie Fußgängernavigation ist ein Instrument, dem jetzt schon ein großes Potential zugesprochen wird. Navigationssysteme für Passanten ermöglichen z.B. eine mobile Bezahlung, wobei kein U-Bahn-Ticket mehr am Schalter gekauft werden muss, sondern mithilfe des Fußgängernavigationssystems, direkt in Abhängigkeit über die gefahrene Strecke abgebucht wird.Leitung: EliasTeam:Jahr: 2006Laufzeit: 2006
![]()
![]()
-
Filterung von Profilen aus digitalen GeländemodellenDigitale Geländemodelle stellen eine sehr kostengünstige Möglichkeit dar, an Höhendaten für einen Geländepunkt zu kommen. Durch die Vorlage der Daten in digitaler Form, ist Auswertung im Zeitalter der elektronischen Datenverarbeitung schnell und unkompliziert erledigt. Über die Genauigkeit der Datensätze werden oft nur wage Angaben gemacht. So gibt die Landesvermessung Niedersachsen an, dass der Abstand eines DGM5 - Qualitätsstufe 2 zur wahren Geländeoberfläche im Mittel bei 1,5m liegt. Durch eine Fehleranalyse von DGM5-Daten in dieser Arbeit wurde beleuchtet, was wirklich hinter der Aussagekraft einer mittleren Abweichung und hinter den Fehlereinflüssen, die auf eine Geländenachbildung durch ein digitales Geländemodell wirken, steckt.Leitung: ThiemannTeam:Jahr: 2006Laufzeit: 2006
![]()
![]()
-
Navigation mit Landmarken (für PDA)Jeder kennt mit Sicherheit folgende Situation: Man befindet sich mitten in der Stadt und muss ein bestimmtes Ziel erreichen, doch hat keine Ahnung, wo das Ziel tatsächlich liegt und wie man am schnellsten dort hingelangt. Nun stehen einem verschiedene Möglichkeiten zur Lösung des Problems zur Verfügung.Leitung: EliasTeam:Jahr: 2005Laufzeit: 2005




















































Abgeschlossene Masterarbeiten
-
Evaluating uncertainty estimation techniques using deep leaning models for classification of point cloudsDeep learning models have proven their ability to perform powerful classification and segmentation considering both 2d and 3D datasets. However, these classifications are often assumed to be accurate, without providing how reliable are these decisions made by the model. There are some possible techniques to convert a stochastic deep learning model into a probabilistic one, to provide a distribution over the weights, instead of finding point estimation for them, leading to an output distribution. Such distribution over output of a model shows not only the true class but also its reliability as the variance of the distribution.Leitung: ShojaeiJahr: 2024
-
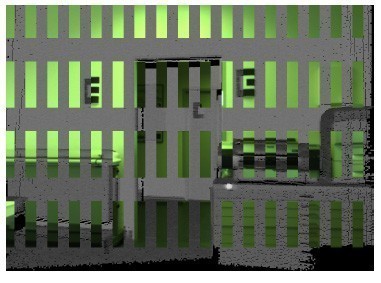
Hololens 2 - Analysis of capabilities and qualityThe Hololens is a device, which captures information of the environment and creates a 3D model of it. At the same time, it is able to place virtual objects into the environment and thus allows AR-applications. The goal of the thesis is to investigate the potential of the Hololens for capturing indoor environments. This includes the acquisition of 3D point clouds and a thorough quality assessment. Subsequently, the point could has to be processed in order to segment important objects or features (e.g. walls, furniture). To this end, the use of Deep Learning models has to be considered.Leitung: Kamalasanan, SesterJahr: 2023
![]()
![]()
-
Future trajectory and Motion guidance with Augmented realityControlling pedestrian motion pattern using augmented reality would require explainable visualizations to convince the user to change directions and speed of motion. Such AR visualizations should avoid cognitive overload and should provide motion guidance that are accurate representations of expected user actions to avoid conflicts / collisions. The focus of this master thesis would be to design and evaluate 3D motion guidance augmentations using AR emphasizing how such visualizations can avoid collisions between pedestrian / smartphone zombie. The student is expected to design and validate motion guidance visualizations in augmented realityLeitung: Kamalasanan, SesterJahr: 2023
![]()
![]()
-
Occupancy-free Space Modeling and Navigation Path Planning in a 3D Voxel Grid Environment for Urban Digital Twin ApplicationsThe urban digital twin is an innovative concept within smart city technology, aiming to develop integrated and intelligent systems by harnessing diverse data from a multitude of sensors. Three-dimensional (3D) geodata plays a pivotal role in the representation and operation of urban digital twins. Tasks such as smart space management and navigation have become increasingly essential in urban digital twin applications, and they can be effectively facilitated using a foundation of 3D geospatial data. Therefore, this master thesis focuses on the modeling of unoccupied space and navigation path planning, employing a 3D voxel grid environment representation. The objective of the thesis is to develop a suitable approach for defining vacant space within urban area, which is utilized to enable collision-free 3D navigation. To achieve this, it is proposed to integrate the point cloud data of the Hannover urban area into a 3D voxel grid structure. In this context, grid cells containing point cloud data are treated as obstacles, while unoccupied cells are collectively constitute the occupancy-free space. The identified vacant space serve as a graph for implementing the shortest path algorithm. Ultimately, both the occupancy-free space and an illustrative route through it are visualized to demonstrate the approach viability.Leitung: Shkedova, FeuerhakeTeam:Jahr: 2023
-
Identifikation und Analyse von Bewegungsmustern in TrajektorienIn dieser Arbeit werden Bewegungsmuster in Trajektoriendatensätzen hinsichtlich der jeweiligen besuchten Orte einer Trajektorie identifiziert. Dazu werden den Aufenthaltspunkten weitere semantische Informationen abhängig von der Position, der Tageszeit und der Aufenthaltsdauer zugewiesen; die Zuweisung von semantischen Informationen hinsichtlich der Position erfolgt mit Hilfe von OpenStreetMap-Daten. Ein weiterer Schwerpunkt lag auf der Identifikation von zusammengehörigen Trajektorienteilstücken, da der gegebene Datensatz als Folge des Datenschutzes anonymisiert wurde; dazu wurde eine Koordinatenprädiktion für alle Trajektorien-Endpunkte durchgeführt, um mit Hilfe einer Umkreissuche und der zeitlichen Nähe einen geeigneten weiterführenden Anfangspunkt einer anderen Trajektorie zu identifizieren. Die auf Basis der Aufenthaltspunkte durchgeführte Erkennung von wiederkehrenden Bewegungsmustern erzeugt bei den verwendeten Datensätzen keine aussagekräftigen Muster, die im gesamten Datensatz in mehreren Trajektorien detektiert werden; allerdings werden für einzelne Trajektorien aussagekräftige, wiederkehrende Muster gefunden. Ein steigender Detailgrad bei der Zuweisung von Kategorien hinsichtlich des Aufenthaltsortes resultiert in weniger wiederkehrenden Mustern, die hingegen eine höhere Aussagekraft angesichts der Interpretation des Bewegungsverhaltens einer beobachteten Person zulassen.Leitung: Golze, Feuerhake, Wage, SesterTeam:Jahr: 2022
-
Entwicklung einer modularen Sensorplattform zur mobilen Erfassung von FahrzeugbegegnungenDas Fahrradfahren im gemeinsamen Verkehrsraum mit Kraftfahrzeugen bereitet vielen Radfahrer*innen Unbehagen. Das Meiden stark befahrener Straßen ist nur mit guter Ortskenntnis möglich, da zur Häufigkeit der Begegnungen mit Kraftfahrzeugen auf den meisten Straßen keine Daten vorliegen. Die Erfassung eines Datensatzes, der Smartphone-Sensordaten über Fahrzeugbegegnungen sammelt, könnte die Grundlage für einen Smartphone-basierten Fahrzeugdetektor bilden. Magnetometer- und Barometer-Messwerte werden als Indikatoren für vorbeifahrende Fahrzeuge verwendet. In dieser Arbeit wird zunächst eine Sensorplattform konstruiert, die zur Erhebung von Smartphone- und anderen Sensordaten im Fahrbetrieb dient. Das System ist so ausgelegt, dass es auch in Zukunft mit anderen Sensorkonfigurationen genutzt werden kann. Daraufhin wird eine Methodik vorgestellt, die auf Basis der Daten einer Kamera und eines Abstandssensors an der Sensorplattform einen Datensatz von Fahrzeugbegegnungen erzeugt. Dieser enthält zu den gefahrenen Trajektorien alle wichtigen Sensordaten eines handelsüblichen Smartphones inklusive der Zeitpunkte von Fahrzeugbegegnungen. Ab- schließend wird auf Basis des Datensatzes ein dreiklassiger Klassifikator trainiert und evaluiert. Dabei wird untersucht, welcher Ansatz einen generalisierbaren Klassifikator liefern kann. Für den Klassifikator werden mehrere auf dem Random Forest basierende Ansätze untersucht. Dabei werden Aufbau und Parameter einer Sliding-Window-Funktion zur Feature-Erzeugung angepasst.Leitung: Wage, Feuerhake, Golze, SesterTeam:Jahr: 2022
![]()
![]()
-
Nutzungsdatengetriebene Analyse des Potentials von MikromobilitätsdienstenDer geteilten Mobilität wird in der öffentlichen Debatte um die Verkehrswende häufig eine entscheidende Rolle zugeordnet. Darunter fallen auch die sogenannten Mikromobilitätsdienste. Das Ziel dieser Masterarbeit ist es, das Potential von Mikromobilitätsdiensten für die Verkehrswende im Hinblick auf die Intentionen der Nutzer, auf zeitliche Variationen, sowie auf Vorteile gegenüber anderen Transportmitteln datenbasiert zu bewerten. Dafür wird eine Fallstudie anhand von Mobilitätsdaten der Bikesharing-Fahrräder und Elektrotretroller zweier Anbieter in Hannover durchgeführt.Leitung: Wage, Feuerhake, GolzeTeam:Jahr: 2022
![]()
![]()
-
Comparison of network representations for analysing temporal power plant dataAs renewable energy is increasingly used in power generation, the temporal and spatial balance of electric power supply and demand requires large-scale power transmission to maintain. Describing such systems requires network modeling theory. This dissertation takes the German power transmission network as an example and explores the impact of different representations. The representation forms include unweighted network, weighted network, multiplex network and interconnected network. In this dissertation, the static topological characteristics of networks under different representations are examined. Then, the temporal data of the available capacity is also introduced, and a temporal network with the power flow path as the time variable is constructed based on Djikstra’s algorithm. In this research, we find that the weighted network is more suitable for modeling transmission networks than the unweighted network, and the multi-layer network may be more suitable for modeling more complex systems.Leitung: Anna Malinovskaya, Philipp OttoTeam:Jahr: 2022
![]()
![]()
-
Hololens 2 – Evaluating 3D Mapping and Technical CapabilitiesIn this study, the technical and 3D mapping capabilities of Hololens 2 was evaluated. The Microsoft Hololens 2 is a head-worn mobile mixed reality device that is capable of mapping its direct environment in real time. It is equipped with different sensors including four visible light tracking cameras and a depth sensor. The 3D map created using these sensor streams can be accessed by research mode. This makes Hololens 2 a powerful tool for mapping an indoor space. In this work, we evaluate the capabilities of Hololens 2 with respect to the task of the 3D indoor mapping, semantic segmentation and 3D modelling as the quality of scanned data highly influences the accuracy of reconstruction and segmentation.Leitung: Vinu Kamalasanan, Monika SesterTeam:Jahr: 2022
![]()
![]()
-
Using dynamic visual variables for visualizing efficiency in route maps(Un)fortunately, as the world becomes more urbanized and the population density of cities continue to increase, there has been a proportional increase in automobile dependence, which has in turn resulted in high traffic density, increased air pollution, higher road risks, amongst other side effects. This thesis aims to develop dynamic visualization variants based on the dynamic visual variables and evaluate the effectiveness of these variants in communicating route efficiency to users and how we can use the dynamic variables to influence route choice.Leitung: Fuest, SesterTeam:Jahr: 2021
![]()
![]()
-
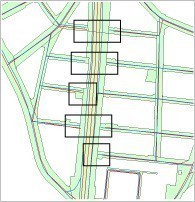
Identification of Logistic Stopping Points in Big Vehicle Trajectory DataThe advance in positioning technologies has facilitated the generation of spatio-temporal data representing the mobility of different objects in geographical space, namely trajectories. Trajectory data mining, especially on trajectory datasets of immense volume, allows improving traffic problems by analyzing spatio-temporal events. Double (second-row) parking is an example of unusual stopping events, which are often caused by parcel delivery vehicles. One of the solutions for the elimination of second-row parking situations created by parcel providers and their additional consequences, such as potential traffic jams, is the provision of spatial parking spaces for parcel services, so-called logistic stopping points. The objective of this thesis is to suggest logistic stopping points for the Hannover region based on trajectory information generated by parcel delivery providers. The delivery trajectories have to be extracted from the provided big vehicle trajectory dataset. As the result, 4030 trajectories and 46, 589 stops are determined as delivery. Based on the obtained delivery stop information, 2018 logistic stopping points for parcel provider services are suggested for the Hannover region. Additionally, an algorithm for second-row parking situation detection is implemented. The algorithm is applied to the delivery stops that happened in the Linden-Nord district of Hannover. The analysis of the results of this work shows that 80% of the detected second-row parking situations could have been prevented by establishing the suggested logistic stopping points.Leitung: Sester, Feuerhake, Wage, KoetsierTeam:Jahr: 2021
![]()
![]() © M. Karakulina
© M. Karakulina
-
Visual communication of bicycle routes using cartographic symbolizationThe present work focuses on the visualization of specially selected features that occur on a bicycle route and that influence comfort while driving. Routes in an urban environment, which are represented by edges of a graph, are mainly used for visualization. These edges of a route are individually mapped with a visual variable each so that the underlying feature appears in a map display. The variants created in this way for one of five characteristics are tested in a user study for efficiency, effectiveness, attractiveness and suitability and compared with more information-rich visualizations. The result of the evaluation reveals that color representations as well as representations with symbols or signatures are perceived as the most ideal.Leitung: Golze, Wage, Fuest, Feuerhake, SesterTeam:Jahr: 2021
![]()
![]()
-
Visual route communication via geometric deformationThis thesis proposes visual route communication via geometric deformation while providing map readers with different route options and helping them by visual means distinguish the most efficient route according to their personal preferences. The proposed communication is directed to create individual routing solutions, motivate travelers to avoid paths traversing the territories, which should be circumvented for different reasons. For route communication via geometric deformation, human psychological aspects were examined. For representation, existing visual variables were investigated and taken as a basis. The deformation method for the thesis found inspiration in perspective drawing art techniques, previously introduced multiple scales designs for maps, geometric projections, and distortions. Finally, the idea to visualize roads in the shape of a hollow or a pit was created. For the deformation implementation, two approaches were proposed in the thesis. The first method is based on the variable scales design. The foundation of the second method is lens distortion. As part of the thesis, an automated system for deformation was realized.Leitung: Fuest, SesterTeam:Jahr: 2021
![]()
![]()
-
Reinforcement learning-based sharing data selection for collective perception of connected autonomous vehiclesIn this thesis, a deep reinforcement learning model is proposed to reduce the redundancy of CPMs for the raw point cloud data sharing scenario in the CAV networks. By combining deep reinforcement learning with collaborative perception, a RL based method for selecting collective perception data that uses the DDQN algorithm is implemented. Through this model, the vehicle can intelligently select the data to be transmitted, thereby eliminating redundant data in the network, saving limited network resources, and reducing the risk of communication network congestion.Leitung: Prof. Markus Fidler, Prof. Monika Sester, Yunshuang Yuan, Shule Li, Sören SchleibaumTeam:Jahr: 2021
![]()
![]()
-
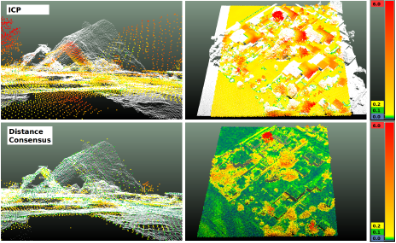
Investigation of Maximum Consensus Techniques for Robust LocalizationHigh integrity localization is a fundamental task for an autonomous driving system. Standard localization approaches are usually accomplished by point cloud registration, which is often based on (recursive) least squares estimation, for example, using Kalman filters. However, due to the susceptibility of least squares minimization to outliers, it is not robust. This thesis focuses on robust localization and aims at the investigation of maximum consensus techniques using LiDAR data. The state-of-the-art maximum consensus approach is evaluated from various perspectives and its shortcomings with respect to straight street scenarios are revealed. Against that, a methodologically optimized normal vector based formulation of maximum consensus is proposed, which uses the distribution of the normal vectors to formulate the accumulator of consensus sets. With doing so, the system is able to achieve a robust localization on all common road conditions. The performances of both approaches are tested and analyzed on a data set containing 1915 epochs. The influence of search parameters is examined with respect to localization accuracy and run time. Results show a considerable improvement of the robustness using the normal vector based formulation.Leitung: Axmann, BrennerTeam:Jahr: 2021
![]()
![]()
-
Entwicklung und Umsetzung einer webbasierten Visualisierung für 3D-PunktwolkenIn dieser Masterarbeit wird eine web-basierte Visualisierung für 3D-Punktwolken entwickelt. Die Lösung basiert auf Client-Server-Architektur und erweitert eine webbasierte 2D-Kartenvisualisierung des Instituts für Kartographie und Geoinformatik. Der Anwender kann durch eine Auswahl in einer Übersichtskarte den Einstiegspunkt in die 3D-Visualisierung wählen. Durch Komprimierungstechniken und durch das dynamische Nachladen samt entfernungsabhängiger Detailierungsgraden wird eine flüssige Navigation durch die komplette 3D-Punktwolke ermöglicht. Hierbei ist eine Steuerung per Tastatur und Maus möglich. Die client-seitige Umsetzung basiert auf WebGL, um im Browser um Ressourcen der Grafikkarte direkt zu nutzen können. Auf der Serverseite werden die Daten in einer datei-basierten Rasterstruktur vorgehalten.Leitung: FeuerhakeTeam:Jahr: 2021
![]()
![]()
-
Parking Pressure Identification using GIS ModellingSmart cities are a result of constant technological advancements that aim to improve the lives of its residents. One of the most significant features of smart cities is urban mobility. Urban traffic congestion is becoming increasingly common in major cities as the number of vehicles increases. Additionally, drivers all around the world struggle to find parking spaces in urban areas. Parking search traffic causes increased travel times and air pollution. So, it is essential to provide real time parking availability to the drivers to reduce the traffic congestion and protect from the increased emissions that affect the environment negatively. So that in this thesis we have used the Internet-of-Things (IoT) technologies and other spatial data which helps to build a model for the parking occupancy minutes prediction in the city of Berlin using Random Forest (RF) Regression machine learning algorithm. The RF Regression model achieved R2 value of 83 % which represents the accuracy of the model. Using the build model from the IoT sensors the parking pressure regions for the areas without sensor are predicted. By identifying the regions with high parking pressure, we can install the IoT sensors which will provide real time parking availability to the drivers through the mobile application.Leitung: Feuerhake, LeichterTeam:Jahr: 2021
![]()
![]()
-
Design, calibration and synchronization of a bicycle mapping platformIn this master thesis, we focused on the preparation of a low-budget mobile mapping system suitable for mounting on a bicycle. This topic formed since the mapping systems are mostly made from expensive sensors which makes it unaffordable for many applications. After having the hardware parts mounted on a model-designed platform we continue to make the system ready for data acquisition. Followed by multiple experiments to justify the system and its limitations. Later on, we did system calibration which in our case consists of camera calibration and extrinsic LIDAR-camera calibration, using this, we did a couple of outdoor data acquisitions and repetition of the system calibration. The results from the experiments are discussed afterwards from which we observed that the camera calibration parameters are oscillating significantly, besides, the transformation parameters estimated by the extrinsic calibration was not constant. These points brought us to the conclusion that the stability of the calibration parameters is needed to be studied in depth in order to find the accuracy of the system. Nevertheless, we managed to colourize the point cloud with the obtained calibration parameters and they were visually correct.Leitung: Feuerhake, BuschTeam:Jahr: 2021
![]()
![]()
-
Robustes Multi-Objekt Tracking mittels Re-Identifizierung für Verkehrsteilnehmerinnen und VerkehrsteilnehmerThema dieser Masterarbeit ist das Tracking von Verkehrsteilnehmerinnen und Verkehrsteilnehmern auf Kamerabildern. Hierfür wird das Multi-Object Tracking nach dem Tracking by Detection Prinzip durchgeführt. Bei diesem Prinzip werden die Detektionen von Objekten verschiedener Zeitschritte einander zugeordnet, sodass nur Detektionen einander zugeordnet werden, die dasselbe Objekt zeigen. Die Erstellung dieser Zuordnung wird hier mit einem Netzwerkfluss in einem Graphen gelöst. Die Gewichte der Kanten werden über die Ähnlichkeiten der Objekte bestimmt, welche mittels einem Siames-Net berechnet werden. Durch das Tracking lassen sich Trajektorien beweglicher Objekte bestimmen, welche wiederum für Anwendungen, wie etwa dem autonomen Fahren oder der Verkehrsüberwachung, verwendet werden können.Leitung: BuschTeam:Jahr: 2021
![]()
![]()
-
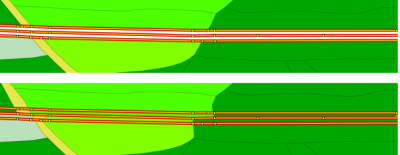
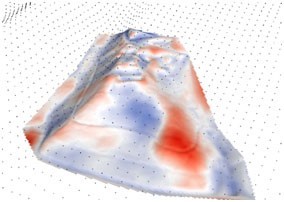
Using Dynamic Objects for Probabilistic Multi-View Point Cloud Registration and LocalizationRegistering two point clouds involves finding the optimal rigid transformation that aligns those two point clouds. For a connected autonomous vehicle (CAV), an accurate localization for an `ego’ vehicle can be achieved by registering its point cloud to LiDAR data from other connected `cooperative’ vehicles. This paper utilizes an advanced object detection algorithm to select observation points that are on detected vehicles. As a prerequisite, a general probability distribution (cf. left figure) based on the observation points from all detected vehicles is established. For the registration, in the first step, observation points from a cooperative vehicle are assigned to detected bounding boxes. Then, each set of points belonging to one bounding box is registered to the general probability distribution resulting in a `probability map’. In the second step, the probability map is used as shared information and the point cloud of the ego vehicle is registered to it. Different from the Euclidean distance metric of the Iterative Closest Point (ICP) algorithm and the consensus count metric of the maximum consensus method, a new probability-related metric is proposed for a coarse registration. It is used to provide an initial transformation, which is used afterwards in a registration refinement by ICP. The registration is completely based on the vehicle information in the scene. The algorithm is evaluated on the collective perception data set COMAP. Especially for some scenes that are challenging to existing registration algorithms such as scenes in a traffic jam or in an open space where no efficient overlaps of observed static objects exists. For those scenarios, from the perspective of accuracy and robustness, the algorithm has shown good performance. The left figure shows the general distribution of observation points, while the figure on the right shows the registration result between 'probability map' of cooperative vehicle and Lidar points of ego vehicle.Leitung: Brenner, Yuan, AxmannTeam:Jahr: 2021
![]()
![]()
-
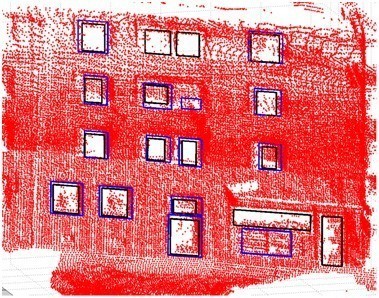
Building Flood Risk Mapping from Mobile Mapping DataUrban flooding has caused damage to buildings in low-lying areas. Our goal is to detect parts of buildings that are vulnerable to flooding, such as basement windows and doors, based on urban mobile LiDAR data. We mark these risk areas on a map to help people take protective measurements. First, we extracted building facades based on urban point cloud data from an area in Hildesheim, Germany. We then projected the 3D point cloud of the building facades onto a 2D image and performed object detection on the 2D image. We used a scan line based approach to detect windows and doors. However, this rule-based approach is highly dependent on parameter settings and has low robustness. Therefore, we consider using the predictions generated by the scan-line based approach as training samples to train a deep learning model. This process requires a small amount of manual annotation of the training samples. To train such a semi-supervised learning model, three datasets were prepared for comparison, namely: all training samples were automatically generated by the scanline based method; the incorrectly detected samples were filtered out as a second dataset; and some of the filtered images were manually relabeled and added to the training dataset to obtain a third dataset.Leitung: FengTeam:Jahr: 2021
![]()
![]()
-
Estimating House Price from Multiple Data SourcesHouse prices are usually estimated based on basic house attributes, such as age. However, prices also vary depending on the different environments in their neighbourhood, such as greenery, noise of vehicles. These attributes are not generally available in traditional datasets as it takes a lot of effort to collect them. Recent research has shown that we can infer these socio-economic attributes from street view images and very high-resolution aerial imagery. In this work, we collected street view images and aerial images of each transacted property in New York City, as well as conventional attributes, to estimate the log-transformed price of the property. For the aerial images, potential visual features were extracted using a model pre-trained on an aerial image dataset, while intermediate values were also extracted, presenting the density of cars and swimming pools. For the street view images, visual latent features were extracted by a standard ResNet-50 model. After detecting and classifying car makes and models in the street view images, we aggregated the information on detected car into census blocks. Various combinations of features were used to compare the performance of the models. The results show that the model augmented with features extracted from street view images and very high-resolution (VHR) satellite images outperforms a model that extracts only basic features from traditional data sources.Leitung: FengTeam:Jahr: 2021
![]()
![]()
-
Range and FoV Estimation of Pedestrian Detection in a Helmet Mapping SystemWhile LIDAR based mobile mapping systems have been used to map the indoor spaces to create indoor maps, such LIDAR based systems can also be used observe motion information while mapping the environment. This motion information can be used to understand the footfall and useful to businesses and also civil engineers for better planning. The objective of the work would be to achieve a Helmet mounted mapping system (HMS) using a Velodyne and IMU and its range estimation in detecting dynamic pedestrians. The HMS is an apparatus consisting the Velodyne and IMU mounted on an industry grade Helmet. Two kinds of existing learning methods, the Complex-YOLO with optimized parameters and PointPillars are applied by training a low-resolution simulated KITTI dataset.Leitung: Kamalasanan, Busch, SesterTeam:Jahr: 2021
![]()
![]()
-
Spatiotemporal Calibration between a Helmet Mapping System and the HoloLens Augmented Reality SystemMobile mapping systems are used to map indoor environments by utilising LIDAR sensors. These sensors when worn with a helmet via the Helmet mapping system (HMS) can also be integrated with Augmented reality (AR) devices like the HoloLens 2. Such integration can be beneficial for real-time 3D visualisation of sensor data. To achieve an integrated system, the HMS and AR device needs to be precisely time synchronized matching the different sensors rates running on different operating systems. The objective of this thesis is to achieve time synchronization and rigid body transformation between a helmet-mounted mapping systems (HMS) equipped with an Xsens IMU module and an Augmented Reality (AR) system HoloLens 2. Pedestrian motion was tested to find patterns for data synchronization using human movement only.Leitung: Kamalasanan, Busch, SesterTeam:Jahr: 2021
![]()
![]()
-
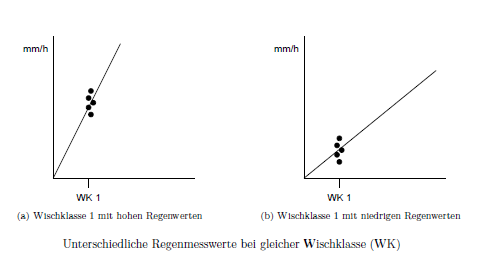
Kalibrierung von Crowd Sourced Messungen der Oberflächenrauigkeit mittels LiDAR DatenSmartphones als kompakte Multisensorplattformen ermöglichen es zum Beispiel beim Fahrradfahren die Oberflächenrauigkeit anhand von Positions- und Beschleunigungsmessungen zu erfassen und Aussagen über die Qualität des Untergrundes zu treffen. Die erfassten Beschleunigungen des am Fahrradlenkers befestigten Smartphones können allerdings ebenso durch den Luftdruck der Reifen, das Gewicht des Fahrers oder die gefahrene Geschwindigkeit beeinflusst werden, sodass sich die von verschiedenen Personen erfassten Daten nicht direkt miteinander vergleichen lassen. In der Arbeit wurde die Eignung von LiDAR Mobile Mapping Punktwolken als unabhängige Referenz für die Erfassung von Oberflächenrauigkeiten und die Modellierung möglicher Einflussgrößen untersucht. Grundlage der Untersuchung dieser Arbeit sind LiDAR Mobile Mapping Punktwolken eines Messgebietes im Georgengarten, für das zusätzlich Beschleunigungs- und GPS-Beobachtungen von 17 Testpersonen zur Verfügung gestellt wurden.Leitung: Feuerhake, Wage, BrennerTeam:Jahr: 2021
![]()
![]() © L. Peter
© L. Peter
-
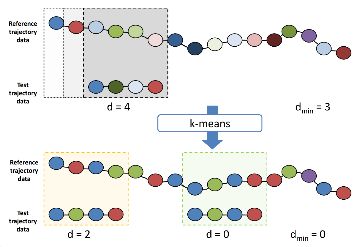
Identification of on-road and separate bicycle lanesCyclists are the most vulnerable participants in the road traffic in these days. Therefore, it is important to protect them, for example, by physically separated bicycle lanes. Continuous position tracking can yield a lot of data, which can help to understand how moving objects behave. This information could be used, e.g. in routing applications aiming to find a more secure route to the users destination. In this thesis the goal is to explore the idea of the identification of bicycle lane types of (OpenStreetMap) road segments using GPS trajectories of bicycles and motorized vehicles. This goal is archieved by applying clustering to the pool of trajectory data. Different distance measures are explored to distinguish between car and bicycle clusters. Three different bicycle lane types are identified within this thesis in the region of Hannover. Each of them can be classified with at least 70 percent accuracy. There are multiple reasons for inaccuracies like GPS positioning errors and the fact that not all cyclists drive on the respective bicycle lanes but on the car lanes.Leitung: Golze, Feuerhake, Prof. Rosenhahn, Prof. SesterTeam:Jahr: 2021
![]()
![]()
-
Bipartite Graphs for Modelling and Monitoring Heterogeneous DataIn this Master Thesis, the student explored network modelling and monitoring on the example of bipartite graphs. In graph theory, k-partite graphs define graphs whose vertices can be partitioned into k different independent sets. The work introduces a joint application of the latent trait analysis model to represent graphs and the exponentially weighted moving average chart for monitoring real-life data. Using the Norwegian company and director dataset to perform modelling and monitoring, it could be displayed how the interlocking directorate (the same person is a director board member of two or more companies) changed overtime at an alarming rate during the global financial crisis. The picture shows a bipartite graph representation of the Norwegian public limited companies (blue nodes) and their directors (orange nodes).Leitung: Malinovskaya, OttoTeam:Jahr: 2021
![]()
![]()
-
Trajektorien-Analyse an KreuzungenDiese Arbeit beschäftigt sich mit Trajektorien an verschiedenen Schnittpunkten mit verschiedenen Regulierungs-Typen (Ampeln, Vorrang/Vorfahrt gewähren, unkontrolliert) und testen einige Methoden zur Erkennung von Bewegungsmustern hinsichtlich ihrer geometrischen und räumlich-zeitlichen Komponenten. Das heißt, im ersten Fall die geometrischen Wege, denen die Fahrzeuge während der Fahrt durch die Kreuzungen folgen, und im zweiten Fall die Art und Weise, wie sie diesen geometrischen Wegen folgen.Leitung: ZourlidouTeam:Jahr: 2020
![]()
![]()
-
Erkennung von Trajektorienanomalien mittels Spektralclustering und RNN-basiertem AutokodiererDie Erkennung von Anomalien ist wichtig, da anomales Verhalten auf kritische Ereignisse oder Objekte in verschiedenen Forschungsbereichen und Anwendungsgebieten hinweisen kann. Einer dieser Bereiche ist der Verkehr, insbesondere die integrierte städtische Mobilität. Trajektorien von sich bewegenden Objekten sind gute Darstellungen ihres Verhaltens in Überwachungsdaten und nützlich bei der Erkennung anomalen Verhaltens. Einerseits können Trajektorien im Vergleich zu einfachen physischen Merkmalen mehr agentenbasierte, langfristige Informationen liefern. Andererseits benötigen Trajektorie-Daten im Vergleich zu Video-Rohdaten, die gewöhnlich als eine Folge von Bildern dargestellt werden, weniger Speicherplatz und Rechenressourcen. Darüber hinaus verfügen sie über eine Vielzahl von Quellen, wie z.B. GPS-Instrumente und Laser-Scanner.Leitung: Sester, KoetsierTeam:Jahr: 2020
![]()
![]()
-
Segmentation of Linear Terrain Structures in Digital Terrain Models Using Deep learningThe archaeologists are interested in detecting terrain structures related to historical mining in the Harz Region. They could manually inspect regions of interest and find relevant terrain structures, but the task is time-consuming, so the goal of this thesis is to use deep learning techniques to automate this tedious task for archaeologists. Linear feature is considered as one of the most essential terrain features, which can be representations of not only natural productions such as drainage networks or geological lineaments, but also manual parts including pipelines, road networks, and so on. The previous studies mainly utilized different computer vision techniques to detect the linear terrain structures, but it is not able to classify them. In our case, different neural networks are used to realize the semantic segmentation of our interested terrain structures which content hollow ways, pathways, roads, forest paths, and ditches. However, due to the complexity of identifying the linear structures, the segmentation result can be incomplete so that image processing algorithms are applied to refine the results.Leitung: Kazimi, Sester, FidlerTeam:Jahr: 2020
![]()
![]()
-
Interaction Classification Between Vehicles and Vulnerable Road Users at a Right-Turn IntersectionAutomatic interaction classification between vehicles and vulnerable road users at intersections is critical for traffic safety and autonomous driving. To this end, a Conditional Variational Auto-Encoder (CVAE) classifier that uses motion information captured by applying dense optical flow and object information extracted by a state-of-the-art object detector is proposed in this thesis. Built on the CVAE system, this thesis uses convolutional and recurrent neural networks for learning spatiotemporal features from the motion and object information. In order to train the classifier, a large real-world dataset is manually labeled from traffic video recordings collected at a busy intersection. In addition, this thesis applies a self-attention mechanism to enable the model to learn the weights between frame-level probabilities, which enhances the performance of the classifier. Furthermore, a sequence-to-sequence model is taken as the baseline model. Compared with the baseline model, the empirical results of the CVAE model using padding method with attention mechanism demonstrate the highest classification accuracy and the least false negative detections.Leitung: Bodo Rosenhahn, Monika Sester, Hao ChengTeam:Jahr: 2020
![]()
![]()
-
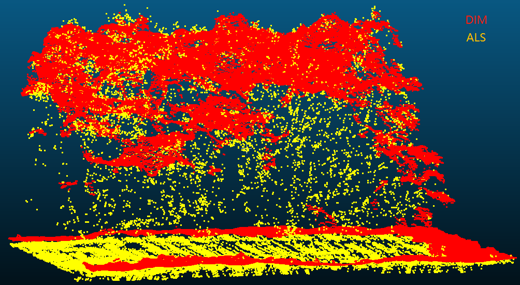
Transformation of Point Clouds using Generative Adversarial NetworksFor their territory, national survey departments have extensive Airborne Laser Scanning (ALS) point clouds with moderate point densities, and a high position and height accuracy. The national survey departments also derive point clouds from aerial flight operations using an algorithm called Dense Image Matching (DIM). These point clouds have a high geometrical and radiometric resolution. Due to being acquired with different sensor systems, ALS and DIM point clouds contain different attributes and behave differently, which makes a joint processing quite difficult. The goal of this thesis is to transform a DIM point cloud this way that it behaves like an ALS point cloud for the following processing steps. Firstly, both point clouds are rasterized, where each raster cell describes the distribution in height for all points within a raster cell. These rasterized images from both point clouds are then used to train a Generative Adversarial Network (GAN) such as the pix2pix network. The network outputs transformed height distributions, which can be back-projected to the original point clouds. Finally, those transformed point clouds can then be tested on different processing steps such as registration, change detection or classification.Team:Jahr: 2020
![]()
![]()
-
Spatiotemporal Functional Data Analysis of Helsinki's Bike Sharing SystemUnderstanding the usage patterns for bike-sharing systems is essential in terms of supporting and enhancing operational planning for such schemes. Studies have demonstrated how factors such as weather conditions influence the number of bikes that should be available at bike-sharing stations at certain times during the day. However, the influences of these factors usually vary over the course of a day, and if there is good temporal resolution, there could also be significant effects only for some hours/minutes (rush hours, the hours when shops are open, and so forth). Thus, in this paper, an analysis of Helsinki's bike-sharing data from 2017 is conducted that considers full temporal and spatial resolutions.Leitung: Philipp Otto, Hamza AlkhatibTeam:Jahr: 2020
![]()
![]()
-
Estimation of building parameters from street view imagesBuildings are important parts of urban area. Their parameters are useful for urban planning, house reconstruction, and navigation. Apart from the aerial images that acquire the information from above, street view images have been identified as an emerging data source to estimate building parameters. A proof-of-concept research is conducted to estimate firstly the building types from street view images. In this work, we proposed an end-to-end approach for building type classification. The street view images are downloaded from Google Street View based on OSM road networks. An automatic labelling process was proposed to prepare a training dataset. Using the state-of-art Convolutional Neural Networks. Building types of each building instances on the OSM can be classified based on the interpretation of street view image.Leitung: Feng, KazimiTeam:Jahr: 2020
![]()
![]()
-
Classification of road roughness in mobile mapping dataDifferent road surface has different roughness, which is a very important feature for flood simulation, roads maintenance and driving safety assessment. This study aims to classify between different road types based on road roughness using mobile mapping data. The input data is LiDAR point cloud after ground removal. Road surfaces are defined as asphalt, cobblestone, grass area and road boundary four categories. The roughness descriptor is generated using multiple local geometric features and distance histogram. Random forest is used to train a classifier and weighted random forest is used to deal with the imbalanced data problem. To make the result smoother and more consistent, conditional random field is applied to process the predicted results. Finally, all tiles are merged and rasterized into 25cm grids to generate a road surface map. The result accuracy is 88.6% on training dataset and 84.7% on test dataset. The model results are validated on a large area where the overall accuracy is 82.9%.Leitung: Feng, FeuerhakeTeam:Jahr: 2020
![]()
![]()
-
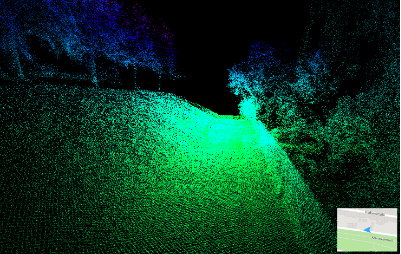
Optimale Zuordnung von Punktwolken mittels Deep LearningIn dieser Arbeit wurde untersucht, ob sich luftgestützte 3D Punktwolken unterschiedlicher Herkunft registrieren lassen. Bei den Punktwolken handelt es sich um Punktwolken, die aus Airborne Laser Scanning (ALS) und aus Dense Image Matching (DIM) abgeleitet wurden. Sie enthalten zwar dieselbe Oberfläche, besitzen jedoch unterschiedliche Eigenschaften. Dabei stellt vor allem Vegetation ein Problem dar. In ALS kann diese durchdrungen werden, wodurch ALS Punktwolken sowohl die Vegetation als auch den darunterliegenden Boden enthält.Leitung: Brenner, PolitzTeam:Jahr: 2019
![]()
![]()
-
Klassifikation und Änderungsdetektion in Mobile Mapping LiDAR Punktwolken3D-Modelle der statischen Umgebung zu erstellen ist eine wichtige Aufgabe für das Voranbringen von Fahrerassistenzsystemen und dem autonomen Fahren. Hierzu stehen in dieser Arbeit Mobile Mapping LiDAR Punktwolken aus 14 Messepochen zur Verfügung, die mithilfe eines Voxel Grids zu einer Referenzkarte weiterverarbeitet werden. Ein Voxel Grid ist eine Datenstruktur, die den realen Raum in volumenhafte Elemente unterteilt und die Punktdichte der Punktwolken reduziert. Zusätzlich werden Daten aus einer Strahlverfolgung bereitgestellt, sodass zwischen durchschossenen und unbekannten Voxeln unterschieden werden kann, wodurch sich Verdeckungen erkennen lassen.Leitung: Brenner, SchachtschneiderTeam:Jahr: 2019
![]()
![]()
-
Entwicklung von umweltgerechten und stauvermeidenden Routingalgorithmen mittels VerkehrssimulationenAufgrund des ständig wachsenden Verkehrsaufkommens in städtischen Umgebungen und damit aufkommender Probleme wie eine erhöhte Luftverschmutzung, spielen umwelt-orientierte Ansätze zur Erreichung einer besseren Stadtverträglichkeit des Verkehrs eine immer wichtigere Rolle. Diese Arbeit befasst sich mit der Entwicklung von umwelt-gerechten Routingalgorithmen, sowie deren Validierung im Rahmen von Verkehrssimulationen. Der verwendete Routingalgorithmus ist der A* - Algorithmus unter Nutzung der jeweils entwickelten Kriterien als Gewichte.Leitung: Sester, FuestTeam:Jahr: 2019
![]()
![]()
-
Multi-Path Prediction of Mixed Traffic Trajectories in Shared SpacesIn shared spaces, road signs, signals, and markings are removed to allow mixed traffic directly interact with each other. The traffic engineer Reid defined it as a street encouraging pedestrian movement and reducing the dominance of vehicles without explicit traffic rules. All users have to follow informal social protocols and negotiation to use the road resources, and avoid any potential collisions. The lack of regulations makes interactions between multimodal road users more complex compared with conventional designs. With the availability of large scale datasets and the development of deep learning techniques in sequence modeling and prediction, deep learning approaches are widely used for trajectory prediction.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
-
Scene Context-Aware Trajectory Prediction in Shared SpaceIn shared spaces, road signs, signals, and markings are removed to allow mixed traffic directly interact with each other. At a micro level, understanding how they behave and how we can foresee their behavior after a short observation time are crucial to intent detection and autonomous driving, and traffic management in shared spaces.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
![]()
![]()
-
Residual Learning for Mixed Traffic Prediction in Shared SpaceIn recent years, with the increased availability of computational power and large-scale datasets, data--driving approaches, especially Deep Learning approaches, have been largely used for trajectory modeling. Nevertheless, predicting mixed traffic trajectories in shared space is not trivial.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
-
A Study of State-of-the-Art DL Methods for Mixed Traffic Trajectory PredictionIn recent years, with the increased availability of computational power and large-scale datasets, data-driving approaches, especially Deep Learning (DL) approaches, have been largely used for trajectory modeling. The performance for pedestrian trajectory prediction in crowded spaces has been improved year by year, such as the state-of-the-art Social-LSTM (Alahi et al., 2016) CVAE (Lee et al., 2017), and Social-GAN (Gupta et al., 2018). The goal of this master thesis is to apply such stat-of-the-art DL approaches in a more challenging environment—shared space—for trajectory prediction with mixed traffic agents and compare their performance.Leitung: Hao Cheng, Prof. Sester and Prof. FidlerTeam:Jahr: 2019
-
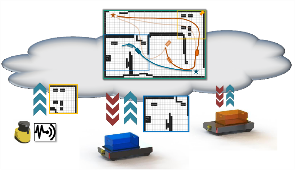
Development of a Client-Server Module for Cooperative Multi-Robot Longterm Map RegistrationNowadays a big amount of robots are used in production and logistic. Due to the large working environment, dynamic objects (e.g. humans or other robots), and semi-static objects (e.g.machine and furniture), a high performance navigation system is required. But only focus on the high performance long term SLAM on single robot is not enough to guarantee the flexible and accurate performance of whole robot fleet in large changing environment.Leitung: Tobias Ortmaier (IMES), Claus Brenner, Steffen Busch (IKG), Philipp Schnattinger (FraunhoferIPA)Team:Jahr: 2019
![]()
![]()
-
Klassifizieren und Detektieren von Verkehrsteilnehmern mittels Neuronalen Netzen und Active Shape ModellenAutonome Fahrzeuge interpretieren ihre Umgebung auf Grundlage ihrer Sensordaten. 360° Laserscanner bieten dabei umfassende und hoch genau Informationen über die Entfernung von Objekten. Die Vorhersage des Verhaltens von Verkehrsteilnehmern unterscheidet sich zwischen PKW, LKW/Bussen, Radfahrern und Fußgängern. Die exakte Position der verschiedenen Verkehrsteilnehmer ist dabei abhängig von ihrer Ausrichtung und ihren geometrischen Ausmaßen. Active Shape Modelle bieten die Möglichkeit den Mittelpunkt der Objekte durch die Schätzung von deformierbaren Modellen, auf der Basis von CAD-Plänen und unter Berücksichtigung ihrer Ausrichtung, zu schätzen.Leitung: Bodo Rosenhahn (TNT), Claus Brenner, Steffen Busch (IKG)Team:Jahr: 2019
![]()
![]()
-
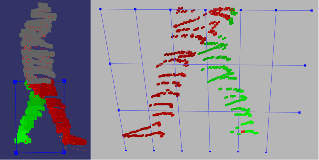
Laserscanner-basierte Prädiktion von Passantenbewegungen durch Filterung und Klassifikation der KörperhaltungVor dem Hintergrund der Sicherheit im Straßenverkehr wird im Folgenden ein Algorithmus vorgestellt, der auf Basis von Punktwolken eine möglichst genaue Vorhersage über die zukünftige Position von Fußgängern trifft. Ein Kernelement ist dabei den aktuellen Bewegungszustand der Fußgänger über einen Random Forest zu klassieren. Dabei steht vor allem eine frühe Detektion von Wechseln zwischen einzelnen Zuständen im Fokus.Leitung: Claus Brenner, Steffen BuschTeam:Jahr: 2019
![]()
![]()
-
Reiseverzögerungsanalyse mit VISSIM und Mustererkennung an geregelten KnotenpunktenDiese Arbeit untersucht die Reisezeit und die Reiseverzögerung an T- und vierseitigen Kreuzungen unter verschiedenen Regulator-Einstellungen ("Vorfahrt gewähren"/Vorfahrts-Verkehrszeichen und unkontrollierte Kreuzungen), wobei sowohl Experimente mit simulierten als auch mit realen Daten durchgeführt werden. In dieser Arbeit wird zunächst die Simulationssoftware VISSIM verwendet, um die Verzögerung und die Haltezeit an durch "Vorfahrt gewähren" kontrollierten und unkontrollierten T- und vierseitigen Kreuzungen abzuschätzen. Im zweiten Teil der Arbeit wird dasselbe Ziel unter Verwendung realer Daten verfolgt.Leitung: ZourlidouTeam:Jahr: 2019
![]()
![]()
-
Mustererkennung des Bewegungsverhaltens für die Kreuzungs-Klassifizierung unter Verwendung von GPS-Trace DatenDas Ziel dieser Arbeit ist es, verschiedene Arten von Regulatortypen von Verkehrsknotenpunkten auf der Basis von GPS-Trace Daten zu klassifizieren. Um dieses Ziel zu erreichen, wird eine Vielzahl von Merkmalen zur Beschreibung des Fahrverhaltens an Kreuzungen berechnet. Diese werden aus den gemessenen Einheiten der GPS-Trace Daten abgeleitet, aus denen sich die Bewegungs-Trajektorie einer Person zusammensetzt.Leitung: ZourlidouTeam:Jahr: 2019
![]()
![]()
-
Robuste Registrierung von luftgestützten PunktwolkenZiel der Arbeit ist die robuste Registrierung von luftgestützten Punktwolken, die aus Airborne Laser Scanning (ALS) und Dense Image Matching (DIM) ab-geleitet wurden. Dafür wurde eine grobe, translative Registrierung mittels Ma-ximum Consensus Schätzers entwickelt und mit einem Standard-ICP vergli-chen. Des Weiteren wurden verschiedene Methoden zur Ausdünnung der Punktwolken untersucht, die besonders die Punkte von Objekten, die in den beiden Punktwolken unterschiedlich dargestellt sind, reduzieren soll.Leitung: Politz, BrennerTeam:Jahr: 2019
![]()
![]()
-
Flood detection from satellite images using deep learningFloods destroy valuable resources and are one of the main threats to human life and property. Flood detection can protect lives and property by providing timely damage assessments. MediaEval is a benchmark that presents challenges in multimedia retrieval. In this thesis, methods were presented for the MediaEval 2019 task City-centered satellite sequences, which is aiming to detect flooding in time-based satellite image sequences. We proposed two Deep Learning methods that have been tried during the experiment – Siamese CNNs and CNN LSTM. By Siamese CNNs, a pair of images were put through two identical CNNs. The image pair was randomly chosen from one sequence. By CNN LSTM, CNN first extracts depth features from each individual image of the sequence. The sequential information among frame features is then learned through a LSTM network. This model is very suitable for learning image sequences. Experimental results showed that Siamese ResNet is not suitable for detecting flooding events from satellite image sequences, but the CNN LSTM could do this kind of task precisely. Significant high accuracy was achieved in flooding events recognition using the proposed DenseNet LSTM method on the MediaEval 2019 Satellite Task dataset.Leitung: FengTeam:Jahr: 2019
![]()
![]()
-
Untersuchung von Kooperation in der Parkplatzsuche anhand einer mikroskopischen VerkehrssimulationIn innerstädtischen Bereichen und in dicht besiedelten Wohngebieten ist die Suche nach einem freien Parkplatz oft mit einem hohen Zeitaufwand verbunden. Die mangelnde Kenntnis über die Parkplatzverfügbarkeit führt zu langen Suchzeiten und zusätzlichem Verkehr auf den Straßen. Neue Kommunikationstechnologien ermöglichen den Austausch von aktuellen Informationen zwischen den Fahrzeugen. Durch Kommunikation von aktueller Position, der geplanten Route und dem Zielort können Fahrer bei ihrer Parkplatzsuche unterstützt werden.Team:Jahr: 2018Laufzeit: 2018
![]()
![]()
-
Tracking von Verkehrsteilnehmern mit LiDARAutonome Fahrzeuge navigieren auf der Basis von spurgenauen Karten. Diese Karten zu erstellen und zu pflegen ist mit einem hohen Aufwand verbunden. Diese Arbeit ist Teil des Automatisierungsprozesses, um aus Daten des täglichen Verkehrs spurgenaue Karten zu erstellen. Im Rahmen der Arbeit wird das Verhalten der Verkehrsteilnehmer in einem komplexen Kreuzungsszenario verfolgt. Es wurden sechs Kreuzungen in Hannover mittels statischen 3D LiDAR-Scans mit 10Hz vermessen, um Trainingsdaten für ein neuronales Netzt zu erstellen.Leitung: Steffen BuschTeam:Jahr: 2018
![]()
![]()
-
Verwendung eines Automotive-Laserscanners zur globalen PositionsbestimmungVor dem Hintergrund der globalen Lokalisierung wird in der Arbeit eine Möglichkeit vorgestellt, eine Positionsbestimmung anhand der Umgebungsmerkmale durchzuführen. Es werden Punktwolken von Straßenabschnitten in urbanem Gebiet verwendet. Dabei werden unter Anwendung eines neuronalen Netzes Merkmale aus der Umgebung extrahiert. Mit Hilfe einer Einteilung der Merkmale in verschiedene Klassen wird ein Streckenabschnitt als Sequenz von Merkmalen dargestellt. Durch den Vergleich mit einer Referenztrajektorie, welche ebenfalls über klassi zierte Merkmale verfügt, wird die aktuelle Position anhand der größten Übereinstimmung gefunden.Leitung: Dr. Alexander Schlichting, Prof. BrennerTeam:Jahr: 2018Laufzeit: 2018
![]()
![]()
-
Traffic-sign Recognition from Street-level Photos: a Deep Learning ApproachThe scope of this thesis is the recognition of traffic-signs from street-level images. A state-of-the-art deep learning detection algorithm is used, the Single Shot Multi-box detector (SSD) and within the thesis its performance is validated experimentally by examining different training strategies.Leitung: Prof. Dr. Bernhard Roth, Co-advisor: Prof. Monika Sester, Supervisor: Stefania ZourlidouTeam:Jahr: 2018Laufzeit: 2018
![]()
![]()
-
Adding landmarks to maps using a graph-based approachDie zunehmende Automatisierung von Fahrfunktionen und erweiterte Komfortfunktionen sind aktueller Bestandteil der Automobilforschung. Eine der wesentlichen Voraussetzungen für viele zukünftige Funktionen, wie das automatisierte Fahren, ist die genaue Kenntnis der aktuellen Fahrzeugpose. Hierfür gibt es unterschiedliche Lokalisierungsmethoden. Wird eine Karte benutzt, welche auf Landmarken basiert, so stellt sich die Aufgabe, diese Landmarken auf Grundlage der Messungen zu aktualisieren.Leitung: Daniel Wilbers (VW), Prof. Ortmaier, Prof. BrennerTeam:Jahr: 2018
-
Deep Learning for Flood Relevant Images and Texts from Social MediaÜberschwemmungen gehören zu den häufigsten und zerstörerischsten Naturgefahren der Erde. Diese Arbeit untersucht die Idee, nutzergenerierte Informationen aus Social Media zu nutzen, um frühe Anzeichen hochwasserrelevanter Ereignisse zu erkennen. Das Ziel dieser Arbeit liegt in der Entwicklung und Implementierung einer Deep Learning Lösung mit der Fähigkeit, das Vorhandensein von hochwasserrelevanten Ereignissen aus benutzergenerierten Bildern und Texten zu erkennen.Leitung: Yu Feng, Prof. BrennerTeam:Jahr: 2018
![]()
![]()
-
Lernen typischer Parkplatzbelegungsmuster anhand von KartendatenZur Vorhersage zukünftiger Informationen über verfügbare Parkplätze werden in intelligenten Transportsystemen, wie beispielsweise Navigationsgeräten, unter anderem historische Daten über den Verlauf der Parkplatzbelegung verwendet. In dieser Arbeit wird untersucht, inwieweit solche Tagesverläufe mit der Hilfe von Kartendaten, wie z. B. Points of Interest, und der Verwendung von Methoden des Maschinellen Lernens vorhergesagt werden können. Dazu werden tatsächliche Belegungsdaten aus Hannover und aus San Francisco verwendet. Die Kartendaten werden sowohl aus OpenStreetMap, als auch aus Yelp gewonnen. Weiterhin werden unterschiedliche Varianten zur Implementierung der Kartendaten in das Maschinelle Lernen getestet, als auch die Relevanz der einzelnen Merkmale untersucht. Die hier verwendeten Methoden des Maschinellen Lernens sind ein Neuronales Netz, ein Regressionsbaum und eine Support Vector Machine.Leitung: Fabian Bock, Prof. BrennerTeam:Jahr: 2018
-
Automatische Parametrische Beschreibung von BodendenkmalenDie Untersuchung von Bodendenkmälern liefert wichtige Erkenntnisse zur Entwicklung der Kulturlandschaft in Deutschland. Sie lässt Rückschlüsse über das Leben in vergangenen Epochen und die Veränderung zwischen den Zeitaltern zu. Die Lagebestimmung oder die messtechnische Erfassung der Bodendenkmäler ist nicht immer einfach. Oftmals lassen sich die Objekte schwer erkennen oder befinden sich an schwer zugänglichen Stellen. Airborne Laserscanning eröffnet hierbei eine vergleichsweise neue Methode der archäologischen Prospektion. Aus den erzeugten Laserscannerdaten lassen sich hochauflösende flächendeckende Geländemodelle erzeugen, mit denen auch vorher unentdeckte Bodendenkmäler in Wäldern erkannt werden können. Die auf diese Weise erzeugte Datengrundlage bietet nicht nur neue Möglichkeiten, sondern auch neue Herausforderungen. Durch die hohen Datenmengen stellt sich die Frage nach der Bearbeitungszeit und die damit verbundene hohe Arbeitszeitbelastung. Um diesem Problem zu begegnen, ist es sinnvoll möglichst viele Prozesse zu automatisieren.Leitung: Frank Thiemann, Monika SesterTeam:Jahr: 2018
![]()
![]()
-
Automated Calibration of the Camera Orientation of a LiDAR Mobile Mapping SystemThe ikg uses a mobile mapping system RIEGL VMX-250 to acquire geo-referenced point clouds and images of the environment. The system includes two laser scanners and four cameras. The coarse camera orientation is estimated by a manual workflow selecting corresponding points in the point cloud and camera images.Team:Jahr: 2017Laufzeit: 2017
-
Automatische Anreicherung von Routenbeschreibungen zur Ausbildung einer kognitiven KarteVon aktuellen Navigationssystemen genutzte Anweisungen beschränken sich üblicherweise auf Entfernungs- und Richtungsangaben (beispielsweise "Biegen Sie in 100 m links auf die Nienburger Straße ein"). Auf diese Weise erreicht der Nutzer zwar das Ziel, hat anschließend jedoch Schwierigkeiten sich eigenständig zu orientieren.Leitung: Sester, FeuerhakeTeam:Jahr: 2017Laufzeit: 2017
![]()
![]()
-
Adaptives Rerouting von Taxis für Parkplatz-Crowd-Sensing mittels Apache SparkDiese Arbeit widmet sich dem Problem der Parkplatzsuche in Städten. Als Ansatz zur Lösung Parkplatzsuchenden Informationen über die vorherrschende Parkplatzsituation bereitzustellen, ist es möglich diese Daten mittels „Crowd-Sensing“ durch Messfahrzeuge zu erfassen. Als Messfahrzeuge eignen sich beispielsweise Taxis, die aufgrund ihrer Funktion ohnehin stets im Straßennetz unterwegs sind.Team:Jahr: 2017Laufzeit: 2017
![]()
![]()
-
Comparison of Methods for Parking Availability PredictionParking availability prediction is an interesting domain which needs to be explored in order to make the search of a parking place easier, which could in turn save time and energy. Employing pre-existing data (sequential parking data) to develop a model for future prediction is the intent of this thesis. Such a model indirectly reduces the need of static sensors to collect data every five minutes on a daily basis.Different methods, namely, linear regression, Long Short Term Memory-LSTM (a specific recurrent neural network) and Auto regressive integrated moving average (ARIMA) are used in the modeling of data to predict the parking availability.Team:Jahr: 2017Laufzeit: 2017
![]()
![]()
-
Extracting Road Network Structure from Heat Maps of GPS Trajectories Using Convolutional Neural NetworksRoad network extraction from GPS trajectories has always been an overemphasized topic for the researches on map improvement. The existence of huge amount of GPS trajectories collected from vehicle movements, cycling and running activities, has encouraged researchers to work on this topic. Besides that, the heat maps (i.e. density maps) of trajectories have been visualized in order to indicate the frequency of use of road segments. With the work represented in this thesis, extraction of road networks from GPS trajectories has been aimed by proposing the use of convolutional neural networks on heat maps.Team:Jahr: 2017Förderung: DFG Graduiertenkolleg SocialCarsLaufzeit: 2017
![]()
![]()
-
Unsicherheitsschätzung einer Ortungsfusion zur Eigenlokalisierung von automatisierten FahrzeugenAutonome Fahrzeuge benötigen eine robuste Lokalisierung. Dafür wurden bereits verschiedene Lösungsansätze entwickelt. Durch eine Kombination verschiedener Ortungslösungen kann eine Verbesserung der Genauigkeit erfolgen und die Verfügbarkeit steigen. Die Fusionierung verschiedener Ortungslösungen heißt Ortungsfusion. In dieser Masterarbeit wird mit einer konkreten Ortungsfusion gearbeitet, die die Fahrzeugpose mithilfe einer graphenbasierten Optimierung schätzt.Team:Jahr: 2017Laufzeit: 2017
-
LiDAR Referenz-Lokalisierung für das automatisierte Fahren/ LiDAR Reference Localization for Automated DrivingModerne Fahrzeugsysteme führen zunehmend teil- und hochautomatisierte Fahrhandlungen aus. Hierfür ist eine hinreichend genaue und robuste globale Fahrzeuglokalisierung eine wichtige Grundvoraussetzung. Dazu wird die Umgebung mit Hilfe von Umfeldsensoren erfasst und mit einer globalen Karte verglichen.Team:Jahr: 2016Laufzeit: 2016
![]()
![]()
-
Kamera und Laserscanner basierte Kartierung und Lokalisierung für das pilotierte ParkenDas pilotierte Fahren im Parkhaus setzt eine hochgenaue und robuste Lokalisierung voraus. In einem solchen Indoor Szenario ist GNSS (Global Navigation Satellite System) in der Regel nicht verfügbar, so dass die Lokalisierung anhand einer Eigenbewegungsschätzung sowie durch Abgleich mit einem Umgebungsmodell erfolgt. In dieser Arbeit wurden die Messwerte von Kamera und Laserscanner fusioniert um die Fahrzeugposition durch einen Partikelfilter SLAM (Simultaneous Localization and Mapping) Ansatz zu schätzen.Team:Jahr: 2016Laufzeit: 2016
![]()
![]()
-
Gesten-basierte Interaktion mit virtuellen 3D UmgebungenMit der Verfügbarkeit immer leistungsfähigerer Rechentechnik im privaten/Freizeit-Sektor ist vor wenigen Jahren auf dem Technologiemarkt ein Wettrüsten zur Entwicklung erschwinglicher Virtual-Reality- (VR) und Augmented-Reality-Hardware ausgebrochen, um potenzielle Märkte insbesondere für realitätsnahe Darstellung von 3D-Inhalten (bspw. Computerspiele) zu erschließen. Kern dieser Technologie ist die Aufbereitung dreidimensionaler Information in Form von 2D-Stereobild-Paaren, die über geeignete Ausgabe-Hardware (Brillen/Helme) konsumiert werden können. Dieses Prinzip lässt sich jedoch auch anderweitig nutzen, beispielsweise zur besseren Exploration von bzw. Interaktion mit räumlichen 3D-Daten.Leitung: Colin FischerTeam:Jahr: 2016Laufzeit: 2016
![]()
![]()
-
Laserscanner basierte Kartierung und Lokalisierung in dynamischen UmgebungenStand der heutigen Technik bei den in Industrieanlagen eingesetzten fahrerlosen Transportfahrzeugen ist eine Eigenlokalisierung auf Basis von Reflektoren. Da die Installation und Vermessung der benötigten Reflektoren zeitaufwändig und teuer ist, verlangen Anlagenbetreiber ein Lokalisierungsverfahren, das ohne Reflektoren funktioniert und ausschließlich die vorhandene Umgebungskontur zur Lokalisierung verwendet.Leitung: Brenner, SchlichtingTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Robust visual navigation for autonomous underwater track vehiclesUnderwater track vehicles, also known as crawler, are universal carrier platforms for many different applications. Crawler having an autonomous navigation would enable the possibility of executing long-term observations without a connection to a base station. This thesis presents approaches that use previous knowledge about the scene that is integrated into motion estimation step by replacing RANSAC with PROSAC to make the motion estimation more robust.Leitung: Brenner, KirchnerTeam:Jahr: 2015Laufzeit: 2015
-
3D Feature Point Extraction from Stereo and Lidar DataZur Lokalisierung von (selbstfahrenden) Fahrzeugen können verschiedene Sensoren eingesetzt werden. In dieser Arbeit wurden Methoden untersucht, mit denen korrespondierende 3D-Merkmalspunkte in LiDAR- und Stereokameradaten gefunden werden können.Team:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Kombination und Homogenisierung von Landmarkenkarten zur Steigerung der Positionierungsgüte beim automatischen FahrenIn dieser Arbeit werden Karten zur landmarkenbasierten Lokalisierung aus detektierten Objekten erzeugt, die mit einem Versuchsträger (PKW) erfasst wurden. Als Datengrundlage stehen die Positionen detektierter Objekte sowie die Fahrzeugtrajektorien der Messfahrten zur Verfügung. Die Erstellung einer Landmarkenkarte erfordert die Zuordnung einzelner Detektionen zu Objekten sowie eine Bereinigung systematischer Fehler. Die auftretenden systematischen Fehler äußern sich z.B. in Form von fehlerhaften Beobachtungswinkeln und zeitlicher Latenz.Leitung: Brenner, HofmannTeam:Jahr: 2015Laufzeit: 2015
![]()
![]()
-
Entwicklung eines Echtzeit-Planers für die lokale Navigation auf holonomen mobilen Service-RoboternEin grundlegendes Problem der Navigation ist die zuverlässige Vermeidung von Kollisionen mit Hindernissen in Echtzeit. Ein dafür genutzter lokaler Planer muss daher den Anforderungen der Echtzeitfähigkeit genügen, was bedeutet, dass die Planung innerhalb einer maximalen Laufzeit garantiert abgeschlossen werden muss. Die maximale Laufzeit kann dabei vom Rechner abhängen. Im Rahmen dieser Arbeit wurde ein lokaler Planer in der Software-Umgebung ROS (Robot Operating System) erstellt, welcher die Anforderung der Echtzeitfähigkeit erfüllt.Leitung: Brenner, WagnerTeam:Jahr: 2015Laufzeit: 2015
-
Punktwolkenvisualisierung mittels BewegungsparallaxeDie interaktive Visualisierung großer Punktwolken, wie sie beispielsweise in Mobile Mapping Daten vorkommen, ist nicht einfach. Sie bedarf Verfahren, die entweder die Gesamtdatenmenge, oder die dem Nutzer angezeigte Datenmenge reduzieren. In dieser Arbeit wird ein Verfahren vorgestellt, dass durch die Technik der Bewegungsparallaxe (im Englischen "parallax scrolling") inspiriert ist.Leitung: EggertTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Extraktion von Fahrspurgeometrie und -topologie auf der Basis von FahrzeugtrajektorienDigitale Weg- und Transportkarten sind heutzutage die Grundlage moderner Navigation und finden in Disziplinen von der Ethologie bis zur Nautik unterschiedlichste Anwendungen. Der für diese Arbeit interessante Anwendungsfall ist die Abbildung von Verkehrswegen für Fahrzeuge als Straßenkarte. Eine Straßenkarte bildet hierbei mindestens die geometrische Struktur eines Verkehrsnetzes unter Erhalt der Konnektivität ab.Leitung: BrennerTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Robotic exploration for mapping and change detectionAutonomous systems and mobile robots become more and more part of our daily life. Examples are cutting the grass in the garden, helping us to get into a parking lot or cleaning the floor. The problems of localization, perception and automatic model building (e.g. maps) are central questions in mobile robotics. How to determine the absolute pose of a robot? What is the best way to explore an a priori unknown environment? Can changes be detected?Leitung: Brenner, PaffenholzTeam:Jahr: 2014Laufzeit: 2014
![]()
![]()
-
Raum-zeitliche Segmentierung von natürlichen Objekten in stark verdeckten SzenenLeitung: PaffenholzTeam:Jahr: 2013Laufzeit: 2013
![]()
![]()
-
Klassifizierung von Stangen aus Laserscanning-PunktwolkenLeitung: SchlichtingTeam:Jahr: 2013Laufzeit: 2013
![]()
![]()
-
Kombinierte Auswertung von Mobile Mapping Punktwolken aus Laserscans und BildernLeitung: HofmannTeam:Jahr: 2013Laufzeit: 2013
![]()
![]()
-
Ableitung eines routingfähigen Verkehrsnetzes aus nutzergenerierten Geodaten durch GeneralisierungLeitung: ThiemannTeam:Jahr: 2013Laufzeit: 2013
![]()
![]()
-
Augmented Reality Visualisierung von archäologischen DatenLeitung: EggertTeam:Jahr: 2012Laufzeit: 2012
![]()
![]()
-
Web-basierte Visualisierung von Mobile-Mapping DatenLeitung: EggertTeam:Jahr: 2012Laufzeit: 2012
![]()
![]()
-
Bewertung von inertialen Messsystemen mittels Laserscannern und bekannter LandmarkenLeitung: BrennerTeam:Jahr: 2012Laufzeit: 2012
![]()
![]()
-
Untersuchung externer Faktoren bei der Regenmessung mittels ScheibenwischernLeitung: FitznerTeam:Jahr: 2012Laufzeit: 2012
![]()
![]()
-
Geomarketing: Visualisierung von ImmobilieninformationenLeitung: Sester, DahindenTeam:Jahr: 2011Laufzeit: 2011
![]()
![]()
-
SNP Analytics – Ein Werkzeug zur visuellen Analyse des Besucherverhaltens im Schweizerischen NationalparkLeitung: SesterTeam:Jahr: 2010Laufzeit: 2010
![]()
![]()
-
Indoor-Navigation als Marketing-KonzeptLeitung: PaelkeTeam:Jahr: 2009Laufzeit: 2009
![]()
![]()
-
Indoor NavigationLeitung: PaelkeTeam:Jahr: 2009Laufzeit: 2009
![]()
![]()
-
Formale Beschreibung und Web-Service-basierte Überprüfung von Constraints in GeodatenLeitung: WerderTeam:Jahr: 2009Laufzeit: 2009
-
Standortanalyse für den GelegenheitsnutzerLeitung: PaelkeTeam:Jahr: 2009Laufzeit: 2009
![]()
![]()
-
Effiziente Zusammenfassung nicht benachbarter Flächen in räumlichen DatensätzenLeitung: HaunertTeam:Jahr: 2009Laufzeit: 2009
-
Aufbau eines Laserscanner-Erfassungssystems zur Positionsbestimmung von FahrzeugenSowohl in der Forschung als auch in der Technik sind Fahrerassistenzsysteme für den Automobilbereich ein sehr aktuelles Thema. Neue Systeme unterstützen den Fahrer in unterschiedlichen Situationen, indem sie nicht nur den Fahrkomfort, sondern vor allem auch die Sicherheit im Straßenverkehr erhöhen. Viele dieser Systeme setzten eine sehr genaue Kenntnis über den eigenen Aufenthaltsort des Fahrzeuges voraus. Gerade in Gebieten mit dichter Bebauung ist dabei die mit dem Global Positioning System (GPS) erlangte Ortungsgenauigkeit in der Größenordnung mehrerer Meter unzureichend. Aus diesem Grund ist die Entwicklung eines genauen und zuverlässigen Verfahrens zur Positionsbestimmung für Fahrzeuge von großer Bedeutung.Leitung: BrennerTeam:Jahr: 2009Laufzeit: 2009
![]()
![]()
-
Personalisierte Landmarken - Einfluss der Ortskenntnis auf die AuswahlLeitung: Elias, PaelkeTeam:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
Ableitung von Corine Land Cover Daten aus dem ATKIS-Basis-DLMLeitung: Thiemann, AndersTeam:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
Mixed-Reality Visualisierung für die StadtplanungLeitung: PaelkeTeam:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
A Framework for Rapid Prototyping of Augmented Reality InterfacesLeitung: PaelkeTeam:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
Extraktion von Fassadenmerkmalen aus Streetmapper-DatenNeben der Darstellung und Interpretation von Laserscanner-Daten in Form von 3D-Modellen können Laserscanner-Punktwolken auch für andere Anwendungen genutzt werden. In diesem Zusammenhang ist vorrangig die Erkennung und Extraktion von Objekten zu nennen. Das Hauptproblem bei der Erkennung von Objekten bezieht sich auf die Punktwolke, die aus einer Menge unorganisierter Punkte besteht. Der Mensch kann Objekte innerhalb einer Punktwolke aufgrund seines Wissens visuell erkennen. Im Gegensatz dazu muss einem Computer die Er-kennung von Objekt anhand von mathematischen Regelungen vorgegeben werden.Leitung: RipperdaTeam:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
Visualisierung von KlimadatenLeitung: Thiemann, PaelkeTeam:Jahr: 2008Laufzeit: 2008
![]()
![]()
-
Personalisierte LandmarkenAufgrund des technischen Fortschritts existieren bereits PDAs und Mobilfunktelefone, die als Naviga-tionsgeräte einsetzbar sind. Durch die zunehmende Verfügbarkeit solch mobiler Systeme rückt die Fußgänger- und Fahrradnavigation immer mehr in den Vordergrund. Die Anpassung von mobilen Navigationssystemen an die speziellen Bedürfnisse von Fußgängern umfasst dabei auch die Adaption der Landmarken an den räumlichen Kontext und die Nutzereigen-schaften.Leitung: EliasTeam:Jahr: 2007Laufzeit: 2007
![]()
![]()
-
Conflation zur Erzeugung von FußgängernavigationsdatenDie Grundlage zurzeit kommerziell verfügbarer Fußgängernavigationssysteme bildet das Geographic Data File (GDF). Das GDF ist aber speziell auf die Anforderungen der Fahrzeugnavigation abgestimmt und kann daher nur mit Einschränkungen für die Fußgängernavigation genutzt werden. Zur Erstellung eines Datenbestandes, welcher den Anforderungen an die Datengrundlage für die Fußgängernavigation genügt, stehen in der vorliegenden Arbeit Auszüge aus dem ATKIS Basis DLM (Straßen- und Wegenetz), Teleatlas-Daten im GDF-Format und Auszüge aus der ALK (Flächen der tatsächlichen Nutzung) zur Verfügung. Die Kombination der Datenbestände wird in dieser Arbeit durch Conflation durchgeführt. Conflation ist ein Verschmelzungsprozess, in welchem zwei oder mehrere unterschiedliche Datenbestände mit Mehrfachrepräsentationen des gleichen räumlichen Gebietes zu einem Datenbestand mit Mono-Repräsentationen integriert werden.Leitung: EliasTeam:Jahr: 2007Laufzeit: 2007
![]()
![]()
-
Innenraumaufnahme und Modellierung der Bethlehemkirche mit einem 3D LasermesssystemDie Bethlehemkirche in Hannover Linden wurde im Jahr 1906 eingeweiht, dem Innenraum der Kirche steht in nächster Zeit ein umfassende Renovierung bevor. In diesem Zusammenhang wurde im Rahmen der Masterarbeit der Innenraum der Kirche mittels der Methode des terrestrischen Laserscannings erfasst sowie ein 3D Modell erstellt. Die Arbeit wurde unter der Betreuung des Instituts für Kartographie und Geoinformatik in Zusammenarbeit mit dem Niedersächsischen Landesamt für Denkmalpflege sowie der Gemeinde der Bethlehemkirche durchgeführt.Leitung: DoldTeam:Jahr: 2007Laufzeit: 2007
![]()
![]()
-
Zielführung in der Fahrzeug-Navigation mittels Mixed RealityLeitung: Brenner, PaelkeTeam:Jahr: 2006Laufzeit: 2006
![]()
![]()
-
Entwicklung eines Qualitätsmaßes für LandmarkenLeitung: EliasTeam:Jahr: 2006Laufzeit: 2006
![]()
![]()
-
Fußgängernavigation auf kombinierten DatenbeständenLeitung: EliasTeam:Jahr: 2006Laufzeit: 2006
![]()
![]()